Навигация
1 Исходные данные
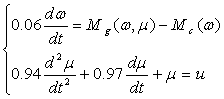
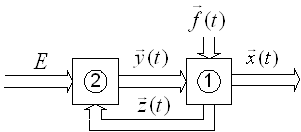
Динамика объекта управления описывается следующей системой дифференциальных уравнений
а) Уравнение моментов:
 (1)
(1)
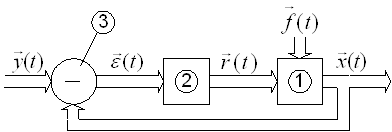
б) Уравнение управляющего устройства:
t - время, сек; J - момент инерции движущихся частей, приведенный к валу двигателя, кг*м / сек2; w - угловая скорость двигателя, 1/сек; Mg, Mc - момент движущих сил и сил сопротивления, кг*м; m - управляющее воздействие; u - задающее воздействие; ![]() ,
, ![]() - параметры управляющего устройства
- параметры управляющего устройства
Функции Mg, Mc заданы таблицами 1 и 2, численные значения коэффициентов определены в таблице 3
Таблица 1 – Зависимость Mg от w и m
| w | m | |||||
| 0.0 | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | |
| 0.00 | 53.50 | 55.62 | 57.54 | 59.86 | 61.98 | 64.10 |
| 10.60 | 46.28 | 48.63 | 50.99 | 53.35 | 55.71 | 58.06 |
| 21.20 | 36.48 | 39.08 | 41.67 | 44.27 | 46.86 | 49.46 |
| 31.80 | 24.11 | 26.95 | 29.78 | 32.61 | 35.44 | 38.27 |
| 42.40 | 9.17 | 12.24 | 15.31 | 18.38 | 21.45 | 24.52 |
| 53.00 | 0.00 | 0.00 | 0.00 | 1.58 | 4.89 | 8.19 |
Таблица 2 – Зависимость Mс от w
| w | 0.00 | 10.60 | 21.20 | 31.80 | 42.40 | 53.00 |
| Мс | 10.70 | 13.50 | 20.22 | 30.84 | 45.37 | 63.82 |
Таблица 3 – Значение параметров системы
| J | m | R1 | R2 | C |
| 0.06 | 10.03 | 19.40 | 1.03 | 1.03 |
Начальные условия: t = 0; w = 0; m = 0; ![]() ; u = 0.5.(3)
; u = 0.5.(3)
2 Нахождение аналитического вида функций Mc(ω) и Mg(ω,μ)
 динамическая система (1)
динамическая система (1)
Аналитический вид функции момента движущих сил Mc(ω) находится методом наименьших квадратов:


![]()
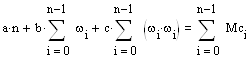
Аналитический вид функции момента движущих сил Mg(ω,μ) находится методом наименьших квадратов. Сначала по столбцам при различных μ вычисляется матрица ABC зависимости Mg(ω,μ) от μ. Первый столбец матрицы ABC вычисляется при μ=0 из системы:
![]()


|
|

Остальные столбцы заполняются аналогично при μ равном 0, 0.2, 0.4, 0.6, 0.8, 1.
Матрица ABC выражает зависимость функции Mg(ω,μ) от ω при различных μ. При этом функция Mg(ω,μ) имеет вид:
![]()
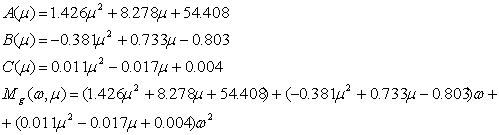
Строки матрицы выражают зависимость слагаемых (А(μ), В(μ) и С(μ)) функции Mg(ω,μ) от μ, соответственно 1-ая строка А(μ), 2-ая строка В(μ), 3-я строка С(μ). А(μ), В(μ) и С(μ) имеют вид:
Коэффициенты при μ вычисляются методом наименьших квадратов из матрицы ABC по строкам. Так для А(μ) по первой строке матрицы ABC из системы


Аналогично находим аналитический вид В(μ) и С(μ). Получаем:
Похожие работы
... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
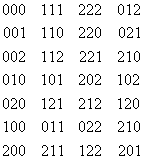
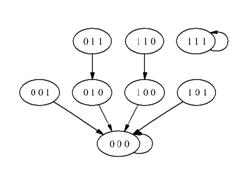
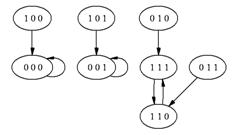
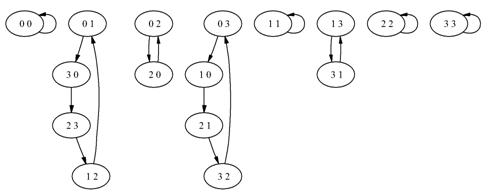
... 000 - , 001 - , 010 - , 011 - , 100 - , 101 - , 110 - , 111 - . Фазовое пространство изображено на рисунке 1.2.3. Рис. 1.2.3. Фазовое пространство . Теорема 1.2.1. Пусть – мономиальная динамическая система. Тогда – система конечных элементов тогда, и только тогда, когда и – системы конечных элементов. Доказательство. Из следствий 1.2.1 и 1.2.3, если – система конечных ...
... общественных отношений, т.е. к их динамике. На уровне общества индивидуальные действия отдельных индивидуумов или групп, а также их связи и отношения образуют системное качество. [9]Все вместе позволяет говорить о применимости к обществу как сложной динамической системе понятия самоорганизация, но. в то же время, отдельные личности или социальные группы, даже социальные слои общества в состоянии ...
0 комментариев