Навигация
Нахождение равновесного состояния системы
13928
знаков
7
таблиц
22
изображения
3 Нахождение равновесного состояния системы
Найдем равновесное состояние системы при следующих условиях ![]() . Подставим эти условия в систему (1), получим систему вида:
. Подставим эти условия в систему (1), получим систему вида:
![]()
Решая систему численно, получаем равновесное состояние системы при ω0=34.54 и μ0=0.5. Построим графики Mc(ω) и Mg(ω,μ) при разных μ0. На рисунке 1 жирными сплошными линиями отмечены графики Mc(ω) и Mg(ω,μ) при μ0=0.5
|
|
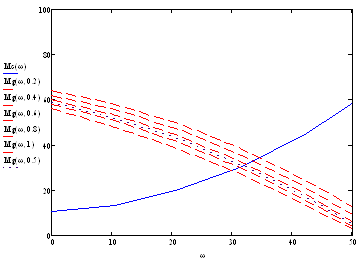
Рисунок 1 – Графики функций Mc(ω) и Mg(ω,μ)
4 Численное нахождение функций ω(t) и μ(t) равновесного состояния
Для того чтобы из системы (1) найти функции ω(t) и μ(t), необходимо понизить степень системы, то есть избавиться от производных второго порядка. Для этого введем функцию Z(t)= μ'(t), получим систему вида:
 (2)
(2)
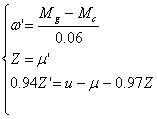
Решая систему численно, получаем табличные значения ω(t) и μ(t), по которым строим графики ω(t) (рисунок 2) и μ(t) (рисунок 3). По графикам хорошо видно, что ω(t) и μ(t) стремятся к равновесным значениям ω0=31.948 и μ0=0.5, ω(t)→ 31.948, μ(t) →0.5, что соответствует вычислениям.
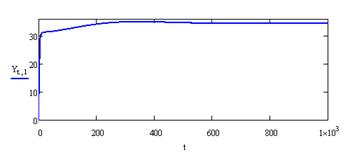
Рисунок 2 – График функции ω(t)
Рисунок 3 – График функции μ(t)
5 Линеаризация и численное решение разомкнутой системы
Линеаризуем систему (2) в окрестности точки равновесия. Для этого выведем систему из равновесия, придав u, μ, ω малые приращения ∆u, ∆μ, ∆ω→0. Соответственно придается приращение Z, ∆Z→0.
![]()
![]() (3)
(3)
Теперь разложим функции Mc(ω) и Mg(ω,μ) в ряды Тейлора по формулам:
Пренебрегая остаточными членами Og(ω,μ) и Oc(ω), получим систему вида:
Или
 (4)
(4)
Решая систему численно, получаем табличные значения ∆ω(t) и ∆μ(t), по которым строим графики ∆ω(t) (рисунок 4) и ∆μ(t) (рисунок 5).
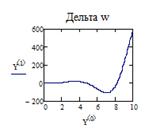
Рисунок 4 – График ∆ω(t)
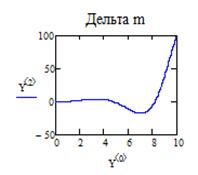
Рисунок 5 – График ∆μ(t)
6 Замкнутая система
В векторно-матричной форме линейную систему с непрерывным временем можно записать в виде:
![]() , где
, где
 | |||||||
 |  | ||||||
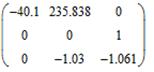 | |||||||
А =(5)
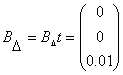
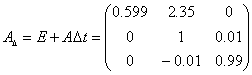
С дискретным временем:
Xk+1 = A∆Xk + B∆Uk , где
Замкнем систему, положив ![]() , где k – коэффициент регулятора. Из соотношений (3) получим
, где k – коэффициент регулятора. Из соотношений (3) получим ![]() , и тогда с непрерывным временем система примет вид:
, и тогда с непрерывным временем система примет вид:
![]() , где
, где

 (6)
(6)
С дискретным временем
![]() , где
, где
Похожие работы
... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
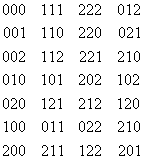
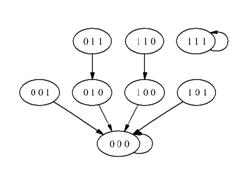
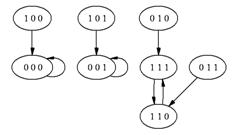
... 000 - , 001 - , 010 - , 011 - , 100 - , 101 - , 110 - , 111 - . Фазовое пространство изображено на рисунке 1.2.3. Рис. 1.2.3. Фазовое пространство . Теорема 1.2.1. Пусть – мономиальная динамическая система. Тогда – система конечных элементов тогда, и только тогда, когда и – системы конечных элементов. Доказательство. Из следствий 1.2.1 и 1.2.3, если – система конечных ...
... общественных отношений, т.е. к их динамике. На уровне общества индивидуальные действия отдельных индивидуумов или групп, а также их связи и отношения образуют системное качество. [9]Все вместе позволяет говорить о применимости к обществу как сложной динамической системе понятия самоорганизация, но. в то же время, отдельные личности или социальные группы, даже социальные слои общества в состоянии ...
0 комментариев