Навигация
5. Переходная характеристика
Переходная характеристика вычисляется как обратное преобразование Лапласа от передаточной функции, делённой на р:
 .
.
Найдём полюса передаточной функции:
![]()
![]() ;
; ![]() .
.
Видим – полюса расположены в правой полуплоскости, а это значит, что процесс будет расходящимся.
Разложим передаточную функцию, делённую на р, на простые дроби:
![]() .
.
Приводим к общему знаменателю:
![]() .
.
Приравниваем коэффициенты при равных степенях р:
![]() ,
,
![]() ,
,
![]() .
.
Откуда находим:
![]() ,
,
![]() ,
,
![]() .
.
Используя табличные значения, находим:
![]() ,
,
![]() ,
,
![]() .
.
Таким образом, получаем:
![]()
![]() .
.
Изменяя время от нуля до 5 секунд, производим расчёт по формуле, результаты заносим в таблицу 3.
Таблица 3. Переходная характеристика
|
| 0 | 0,5 | 1 | 1,5 | 2 | 2,5 | 3 | 3,5 | 4 | 4,5 | 5 |
|
| 0 | 0,654 | 17,59 | 62,52 | 69,32 | -243 | -1209 | -1744 | 3830 | 24151 | 42653 |
Строим график переходной характеристики – рис. 3.
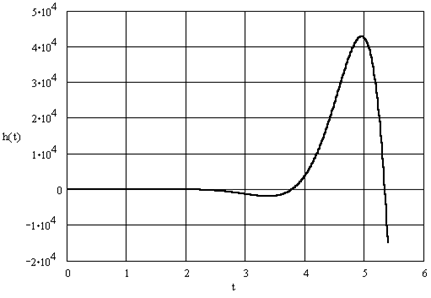 |
Рис. 3. Переходная характеристика 6. ЛАЧХ
Для получения ЛАЧХ найдём модуль частотной передаточной функции:
 .
.
далее находим 20 десятичных логарифмов от найденного модуля:
 .
.
Это и есть выражение для ЛАЧХ.
Расчёт значений ЛАЧХ ведём в логарифмическом масштабе. Результаты записываем в таблицу 4. Размерность ЛАЧХ – децибелы (дБ).
Таблица 4. ЛАЧХ
|
|
|
|
|
|
|
|
|
|
| -1 | 0,1 | 9,17406 | 0,1 | 1,25893 | 9,20891 | 1,2 | 15,8489 | -11,426 |
| -0,9 | 0,12589 | 9,17482 | 0,2 | 1,58489 | 9,08243 | 1,3 | 19,9526 | -13,614 |
| -0,8 | 0,15849 | 9,17601 | 0,3 | 1,99526 | 8,70564 | 1,4 | 25,1189 | -15,738 |
| -0,7 | 0,19953 | 9,17788 | 0,4 | 2,51189 | 7,83066 | 1,5 | 31,6228 | -17,818 |
| -0,6 | 0,25119 | 9,18077 | 0,5 | 3,16228 | 6,23375 | 1,6 | 39,8107 | -19,869 |
| -0,5 | 0,31623 | 9,18519 | 0,6 | 3,98107 | 3,94960 | 1,7 | 50,1187 | -21,902 |
| -0,4 | 0,39811 | 9,19182 | 0,7 | 5,01187 | 1,26946 | 1,8 | 63,0957 | -23,923 |
| -0,3 | 0,50119 | 9,20135 | 0,8 | 6,30957 | -1,5050 | 1,9 | 79,4328 | -25,936 |
| -0,2 | 0,63096 | 9,21400 | 0,9 | 7,94328 | -4,1982 | 2 | 100 | -27,944 |
| -0,1 | 0,79433 | 9,22792 | 1 | 10 | -6,7459 | 2,1 | 125,893 | -29,950 |
| 0 | 1 | 9,23483 | 1,1 | 12,5893 | -9,1470 | 2,2 | 158,489 | -31,953 |
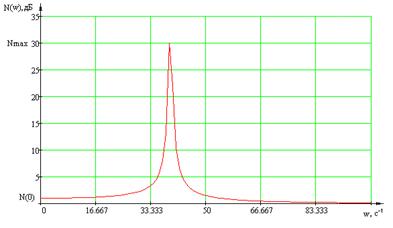
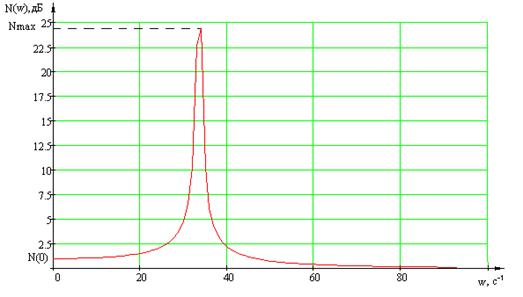
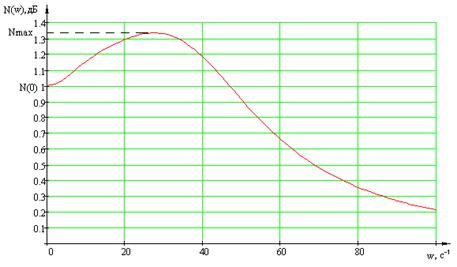
Строим график ЛАЧХ – рис. 4.
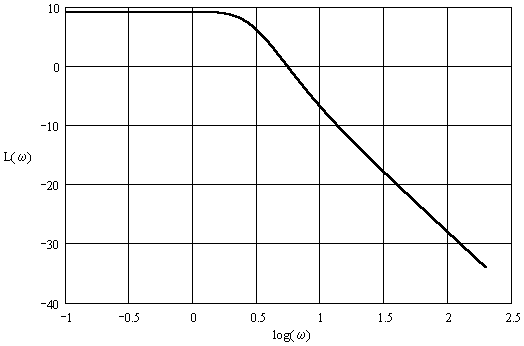
Рис. 4. ЛАЧХ
ФЧХ – угол поворота вектора ![]() на комплексной плоскости в зависимости от частоты:
на комплексной плоскости в зависимости от частоты:
![]() .
.
Расчёт значений ФЧХ ведём в логарифмическом масштабе. Результаты записываем в таблицу 5. Размерность ФЧХ – радианы (рад).
Таблица 5. ФЧХ
|
|
|
|
|
|
|
|
|
|
| -1 | 0,1 | 0,03263 | 0,1 | 1,25893 | 0,44997 | 1,2 | 15,8489 | 1,66382 |
| -0,9 | 0,12589 | 0,04110 | 0,2 | 1,58489 | 0,58831 | 1,3 | 19,9526 | 1,64958 |
| -0,8 | 0,15849 | 0,05177 | 0,3 | 1,99526 | 0,77030 | 1,4 | 25,1189 | 1,63592 |
| -0,7 | 0,19953 | 0,06524 | 0,4 | 2,51189 | 0,99225 | 1,5 | 31,6228 | 1,62384 |
| -0,6 | 0,25119 | 0,08227 | 0,5 | 3,16228 | 1,22480 | 1,6 | 39,8107 | 1,61359 |
| -0,5 | 0,31623 | 0,10383 | 0,6 | 3,98107 | 1,42316 | 1,7 | 50,1187 | 1,60513 |
| -0,4 | 0,39811 | 0,13123 | 0,7 | 5,01187 | 1,56064 | 1,8 | 63,0957 | 1,59824 |
| -0,3 | 0,50119 | 0,16622 | 0,8 | 6,30957 | 1,63913 | 1,9 | 79,4328 | 1,59268 |
| -0,2 | 0,63096 | 0,21126 | 0,9 | 7,94328 | 1,67427 | 2 | 100 | 1,58822 |
| -0,1 | 0,79433 | 0,26981 | 1 | 10 | 1,68250 | 2,1 | 125,893 | 1,58466 |
| 0 | 1 | 0,34696 | 1,1 | 12,5893 | 1,67633 | 2,2 | 158,489 | 1,58182 |
Строим график ФЧХ – рис. 5.
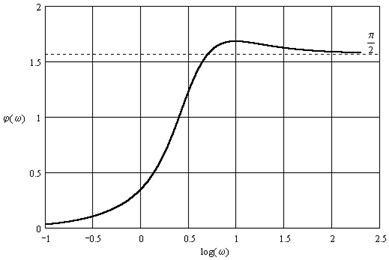
Рис. 5. ФЧХ
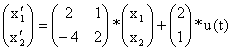
8. Структурная схема системы
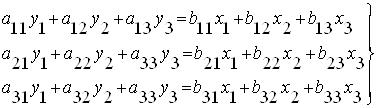
Записываем матричные уравнения системы:
![]() ;
;
![]() .
.
Подставляем исходные данные:
 ;
;
 .
.
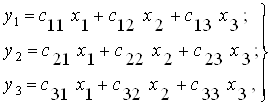
Производим умножение матриц:
![]() ,
,
![]() ,
,
![]() .
.
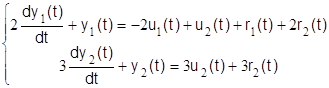
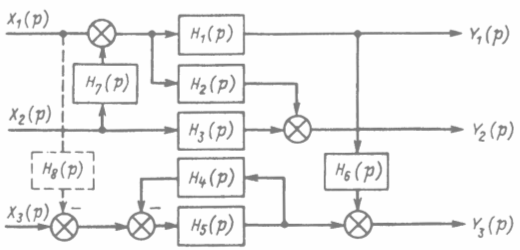
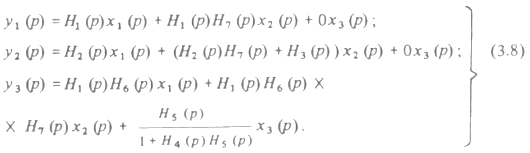
Получили систему уравнений, на основе которой строим структурную схему – рис. 6.
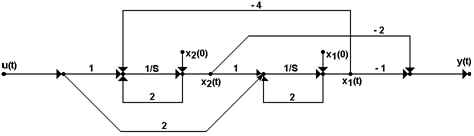
Рис. 6. Структурная схема системы
Часть 2:
Осуществить синтез замкнутой системы с собственными числами
{–1; –4; ± 5j}.
Построить наблюдатель полного порядка.
Дано: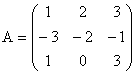 ,
,
 ,
,
![]() .
.
Рассматриваем линейную систему с постоянными параметрами:
![]() ,
,
![]() .
.
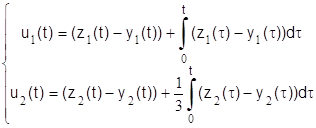
Пусть управление линейно зависит от координат состояния системы:
![]() ,
,
где
![]() – входной командный сигнал,
– входной командный сигнал,
К – матрица коэффициентов обратной связи.
После замыкания эта система имеет структуру, изображённую на рис. 7.
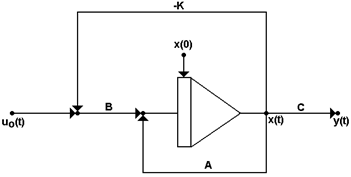
Рис. 7. Структура исходной системы
Движение системы описывается линейным дифференциальным уравнением:
![]() .
.
Таким образом, динамические свойства системы полностью определяются матрицей А – ВК, её характеристическими числами.
Характеристический многочлен исходной системы равен:

![]() .
.
Спектр характеристических чисел (корни характеристического многочлена):
![]() .
.
Желаемый характеристический многочлен замкнутой системы ![]() по условию имеет 4 собственных числа, но наша исходная система имеет третий порядок, поэтому одно из собственных чисел необходимо убрать, убираем собственное число (–1), тогда:
по условию имеет 4 собственных числа, но наша исходная система имеет третий порядок, поэтому одно из собственных чисел необходимо убрать, убираем собственное число (–1), тогда:
![]() .
.
Пусть матрица коэффициентов обратной связи ![]() , тогда характеристический полином замкнутой системы:
, тогда характеристический полином замкнутой системы:

![]() .
.
Приравниваем коэффициенты при равных степенях многочленов ![]() и
и ![]() :
:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Решая полученную систему уравнений, получаем:
![]() ,
,
![]() ,
,
![]() .
.
Искомое управление принимает вид:
![]() .
.
Структура синтезированной системы представлена на рис. 8.
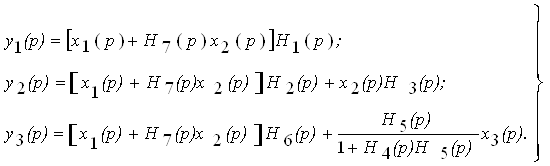
Она построена по уравнениям:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
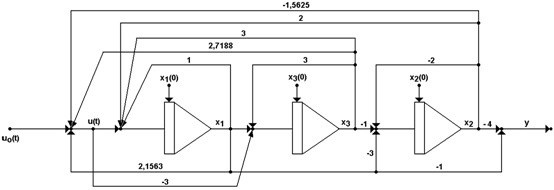
Рис. 8. Структура синтезированной системы
2. Построение наблюдателя полного порядкаСистема
![]()
называется асимптотическим наблюдателем полного порядка, если для любого начального состояния х(0) и всех ![]() оценка
оценка ![]() с ростом времени асимптотически приближается к вектору состояния
с ростом времени асимптотически приближается к вектору состояния ![]() .
.
Найдём структуру асимптотического наблюдателя, для чего определим ошибку восстановления ![]() и найдём модель её изменения:
и найдём модель её изменения:
![]()
![]() .
.
Затем потребуем, чтобы ![]() при всех
при всех ![]() и
и ![]() .
.
Это равенство возможно при:
![]() ,
,
![]() .
.
Таким образом, структура асимптотического наблюдателя полного порядка определяется моделью вида:
![]() .
.
На рис. 9 изображена структура системы и её наблюдателя.
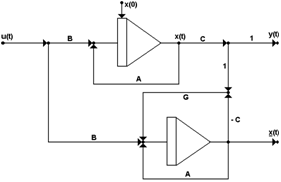
Рис. 9. Структура системы с наблюдателем
Задача синтеза наблюдателя системы состоит в том, чтобы найти матрицу ![]() . Это можно сделать, исходя из условия асимптотической сходимости оценки
. Это можно сделать, исходя из условия асимптотической сходимости оценки ![]() к вектору состояния
к вектору состояния ![]() при любых начальных состояниях наблюдателя и системы.
при любых начальных состояниях наблюдателя и системы.
Пусть ошибка восстановления ![]() , тогда
, тогда
![]() .
.
Ошибка восстановления описывается линейным однородным дифференциальным уравнением с матрицей ![]() и ненулевыми начальными условиями, а поэтому асимптотическая сходимость ошибки к нулю возможна тогда и только тогда, когда собственные числа матрицы
и ненулевыми начальными условиями, а поэтому асимптотическая сходимость ошибки к нулю возможна тогда и только тогда, когда собственные числа матрицы ![]() , которые называют полюсами наблюдателя, располагаются в левой полуплоскости.
, которые называют полюсами наблюдателя, располагаются в левой полуплоскости.
Пусть матрица
 ,
,
тогда матрица
 .
.
Полюса наблюдателя определяются уравнением:

![]() .
.
Переходные процессы в наблюдателе будут несравнимы с процессами в системе, если полюса наблюдателя будут значительно левее полюсов системы. Поскольку характеристические числа замкнутой системы равны:
{– 4; ± 5j},
то расположим полюса наблюдателя в точках:
![]() .
.
Желаемый характеристический полином наблюдателя принимает вид:
![]() ,
,
что будет иметь место тогда, когда:
![]() ,
,
![]() ,
,
![]() .
.
Решая полученную систему уравнений, получаем:
![]() ;
;
![]() ;
;
![]() .
.
Находим матрицу:

Модель асимптотического наблюдателя системы принимает вид:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Структура системы со своим асимптотическим наблюдателем полного порядка представлена на рис. 10.
Она построена по уравнениям:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Похожие работы

... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... kL>kN, где через kL, kG, kN обозначены порядки старших производных полиномов от р в соответствующих матрицах L(p), G(p) и N(p). Уравнение движения САУ составляется на основе ее структуры и математического описания, входящих в систему элементов, и имеет вид уравнения (1.1.1), где u(t)=z(t) и z(t) - вектор задающих воздействий на систему. Уравнение движения САУ (1.1.1), записанное относительно ...
... по соответствующему полю). В окне Конструктора таблиц созданные связи отображаются визуально, их легко изменить, установить новые, удалить (клавиша Del). 1 Многозвенные информационные системы. Модель распределённого приложения БД называется многозвенной и её наиболее простой вариант – трёхзвенное распределённое приложение. Тремя частями такого приложения являются: ...
... , а 3 формируется путем умножения построчно колонок 1 и 2. Модель в абсолютных единицах после определения коэффициентов записывается в виде Динамическая идентификация Многие технологические объекты управления, функционирование которых в динамике еще недостаточно изучено, не могут быть описаны аналитически. Для получения их динамических моделей также применяются экспериментальные методы. ...
0 комментариев