Навигация
Проектирование системы автоматического управления
14365
знаков
1
таблица
27
изображений
Содержание.
1.Анализ системы.................................................................................................4
1.1 Исследование устойчивости...................................................................4
1.2 Построение АЧХ, ФЧХ, АФЧХ..............................................................7
1.3 Численные методы интегрирования........................................................9
1.4 Анализ системы с использованием спектрального метода (базис Лягерра)................................................................................................................13
2. Синтез регулятора...........................................................................................17
3. Синтез робастного регулятора матричным методом...................................19
Приложение..........................................................................................................22
Литература............................................................................................................33
![]()
![]()
![]()
![]()
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]() у(t) x(t)
у(t) x(t)
![]()
![]() - -
- -
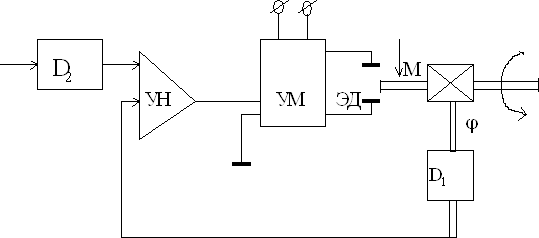
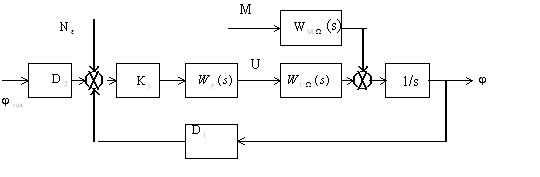
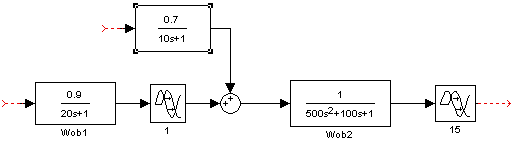
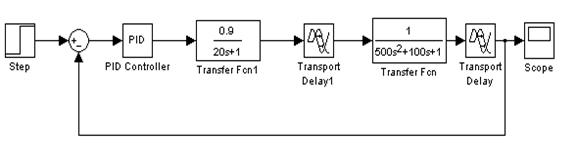
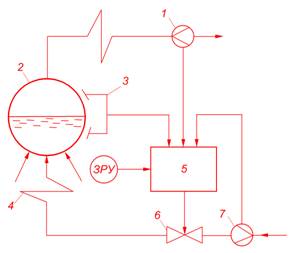
Рис. 1. Структурная схема заданной САУ
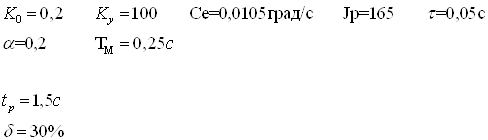
Данные:
![]()
![]()
![]()
1. Анализ системы.
1.1 Исследование устойчивости.
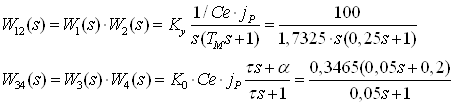
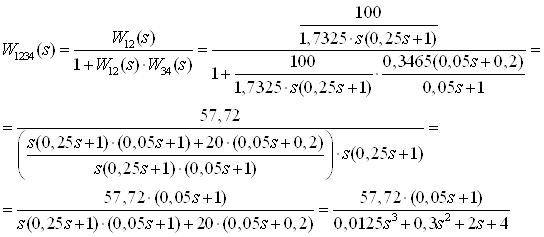
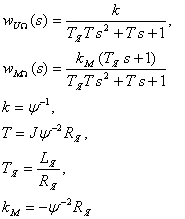
 - передаточная функция
- передаточная функция
![]() - характеристический полином
- характеристический полином
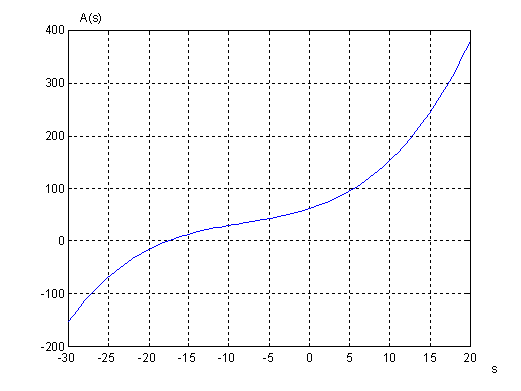
Рис. 2. Характеристический полином.
![]() имеет 1 действительный корень и 2 комплексных.
имеет 1 действительный корень и 2 комплексных.
![]()
Уравнение решается методом Стеффенсена.
Метод Стеффенсена.
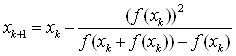
Начальное приближение ![]() для нахождения действительного корня.
для нахождения действительного корня.
![]()
На рис.3. изображено значение корня от итерации.
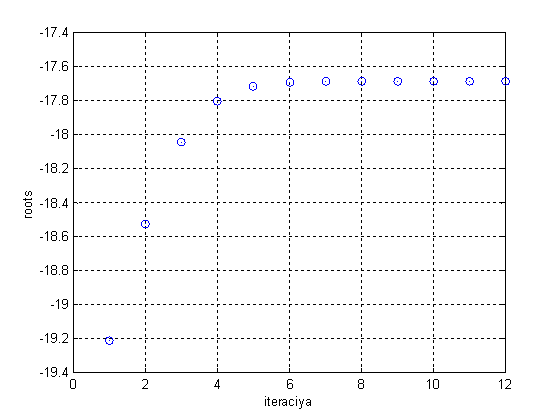
Рис.3. Динамика изменения корня в зависимости от итерации.

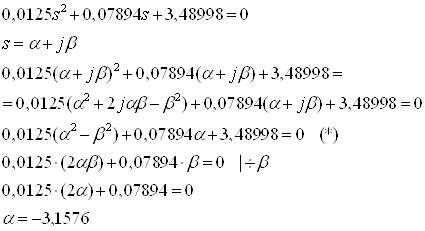
Подставим ![]() в (*).
в (*).
Корни характеристического уравнения
Полюса передаточной функции находятся в левой полуплоскости. Система устойчива. Система будет колебательной т.к. корни имеют мнимую часть ![]()
Построение АЧХ, ФЧХ, АФЧХ.
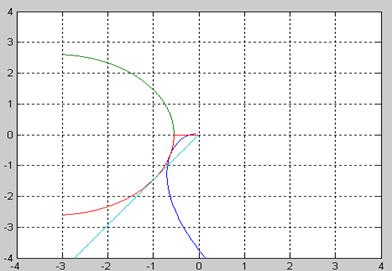
Годограф АФЧХ.
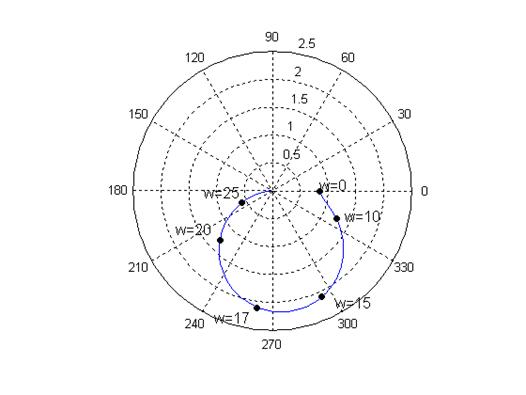
Рис.4. АФЧХ
График АЧХ

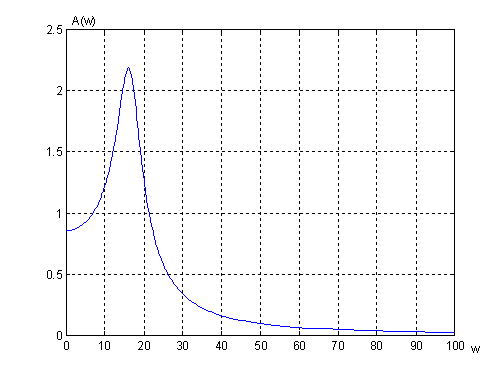
Рис.5. АЧХ
![]()
![]()
![]()

График ФЧХ
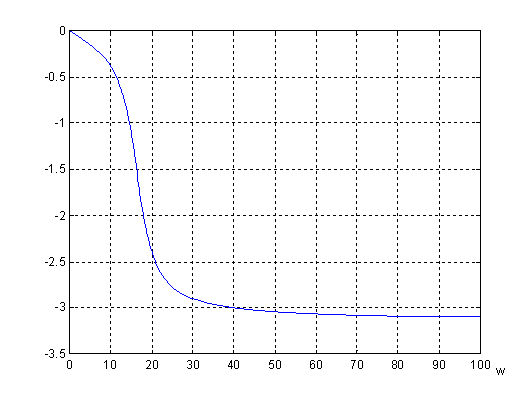
Рис.6. ФЧХ

Похожие работы
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...



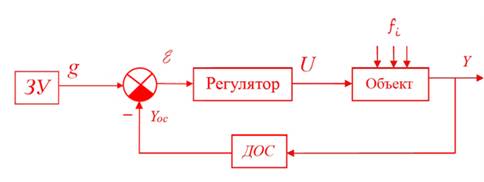
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... регулятор на нелинейный элемент. В качестве нелинейного элемента возьмём идеальное реле, статическая характеристика звена изображена на рисунке 23. Рис.23. Идеальное реле Чтобы реализовать данный регулятор в заданной системе автоматического управления, требуется рассчитать значения параметра с. Проанализируем работу системы с нелинейной характеристикой и без неё в Simulink, а затем найдём ...
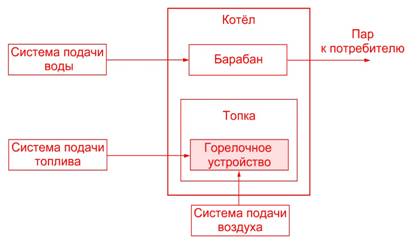

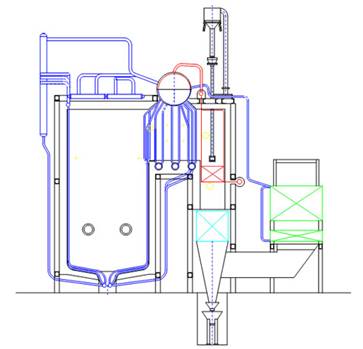
... режимов функционирования котла. Повышение экологических характеристик котельной и культуру производственного процесса. Благодаря программному управлению система автоматически отслеживает все параметры текущих процессов, реализуемых водогрейными и паровыми котлами, и управляет технологическим оборудованием, обеспечивая нормальное и безаварийное функционирование котельной установки. Кроме того, ...
0 комментариев