Навигация
Построение переходного процесса численным методом
14365
знаков
1
таблица
27
изображений
1.2 Построение переходного процесса численным методом.
Для решения дифференциального уравнения используется многошаговый, неявный метод второго порядка, интерполяционная схема Адамса.
В неявных методах используется информация о возможном будущем значении решения в точке п+1. Это несколько повышает точность получаемых результатов по сравнению с явными методами.
![]()
Погрешность ![]()
![]()
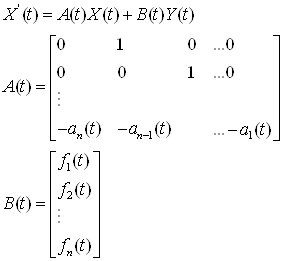
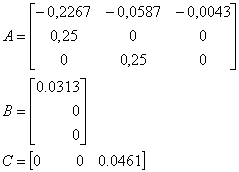
При решении уравнения высокого порядка необходимо перейти к нормальной форме Коши.
![]()
нормальная форма Коши имеет вид
![]()

Разгонный метод Рунге – Кутта 5.

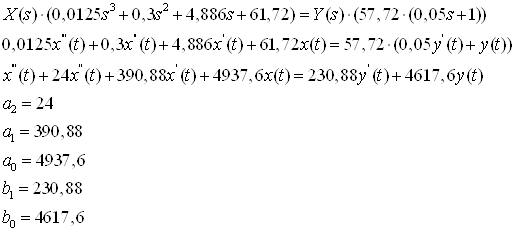
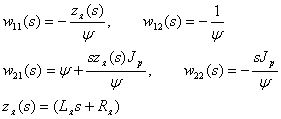
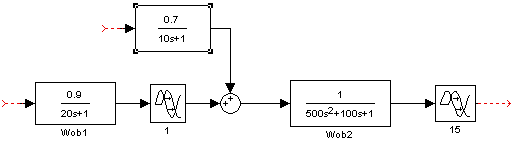
Дифференциальное уравнение системы.

![]()
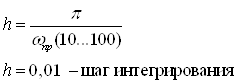
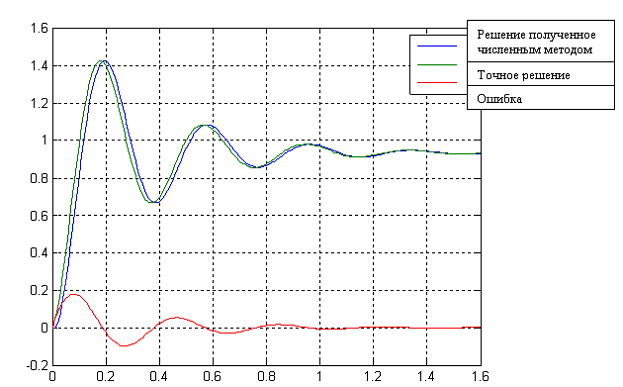
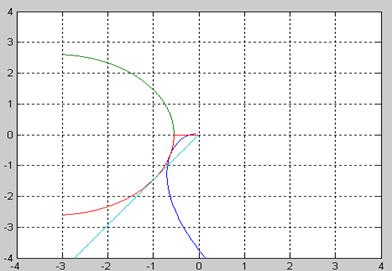
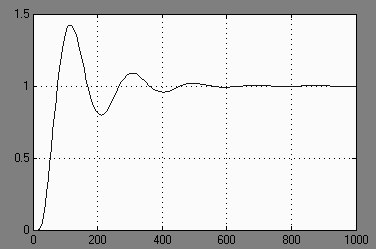
Рис.7. Переходная функция найденная численным методом и точная ![]()

Рис.8. Переходная функция найденная численным методом и точная при ![]()
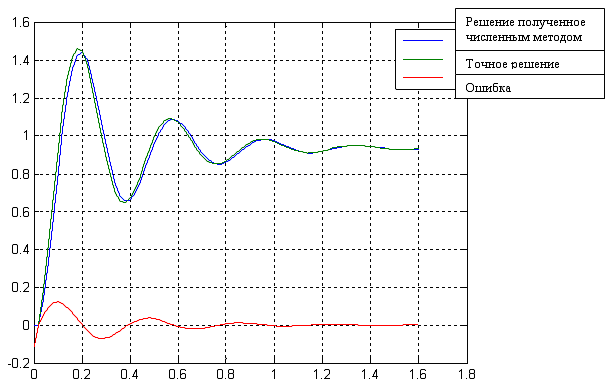
Рис.9. Переходная функция найденная численным методом и точная ![]()
Заключение: из графиков видно, что наибольшая погрешность возникает в самом начале процесса интегрирования.
При ![]() погрешность значительно вырастает.
погрешность значительно вырастает.
1.3 Анализ спектральным методом системы по базису функций Лягерра.
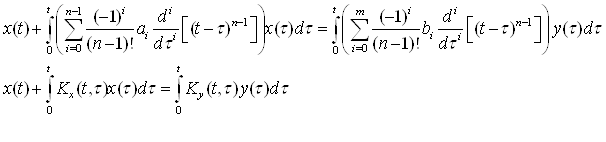
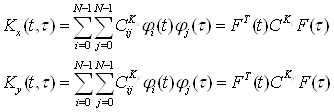
Разложим ядра ![]() интегрального уравнения в ряды Фурье по базису функций Лягерра.
интегрального уравнения в ряды Фурье по базису функций Лягерра.
 функции Лягерра.
функции Лягерра.
Выбираем ![]()

Дифференциальное уравнение системы.
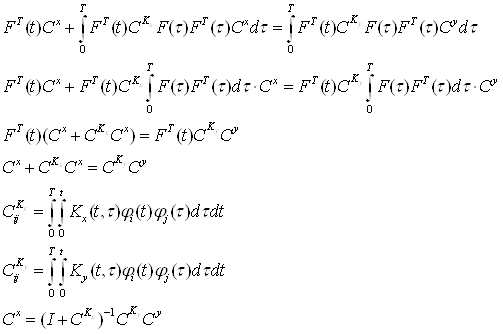
Спектральная характеристика системы определяется по формуле
![]()
![]()

Спектр выходного сигнала системы:
 Спектральная характеристика системы:
Спектральная характеристика системы:

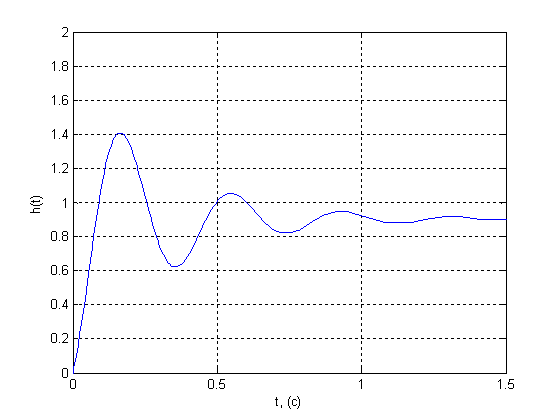
Рис.10. Переходная функция, построенная спектральным методом
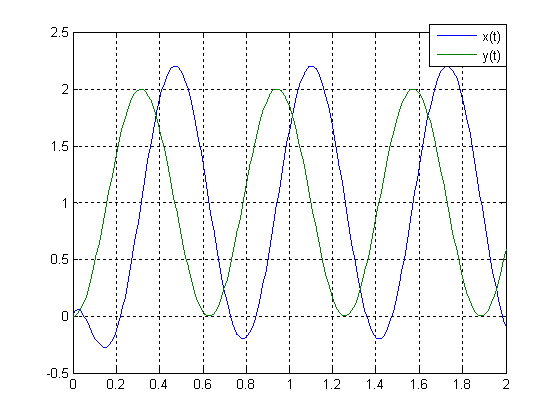
Рис.11. Реакция на ![]()
Фазовый сдвиг ![]()
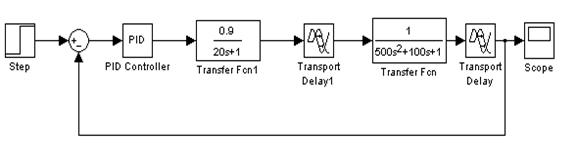
2. Синтез регулятора
Так реальная переходная характеристика системы не удовлетворяет поставленным требованиям ![]() , необходимо произвести коррекцию системы. В качестве корректирующего устройства ПИД –регулятор
, необходимо произвести коррекцию системы. В качестве корректирующего устройства ПИД –регулятор ![]() .
.
Эталонная переходная характеристика ![]()
Необходимо минимизировать следующую целевую функцию.
![]()
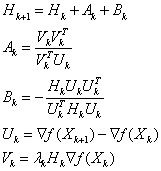
Метод оптимизации Дэвидона, Флетчера, Пауэла.
Согласно данному методу минимум ищется в направлении ![]()
![]() - ищется на каждом шаге мини минимизацией
- ищется на каждом шаге мини минимизацией ![]()
![]() - некоторая симметричная положительно определённая матрица, которая при
- некоторая симметричная положительно определённая матрица, которая при ![]() переходит в матрицу Гессе. Обычно при
переходит в матрицу Гессе. Обычно при ![]()
![]()
достоинства этого метода высокая скорость сходимости, простота вычисления ![]()
![]() - будем искать методом золотого сечения.
- будем искать методом золотого сечения.
Параметры регулятора:
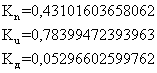
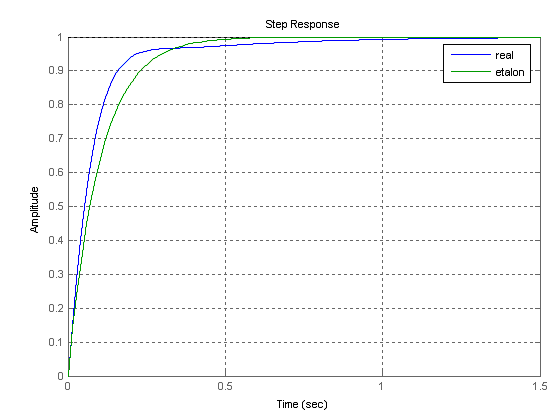
Рис.12. Графики переходных характеристик системы
Похожие работы
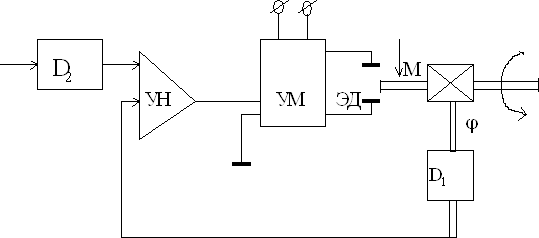
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...



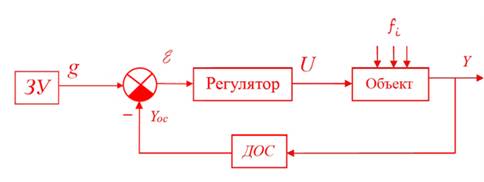
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... регулятор на нелинейный элемент. В качестве нелинейного элемента возьмём идеальное реле, статическая характеристика звена изображена на рисунке 23. Рис.23. Идеальное реле Чтобы реализовать данный регулятор в заданной системе автоматического управления, требуется рассчитать значения параметра с. Проанализируем работу системы с нелинейной характеристикой и без неё в Simulink, а затем найдём ...
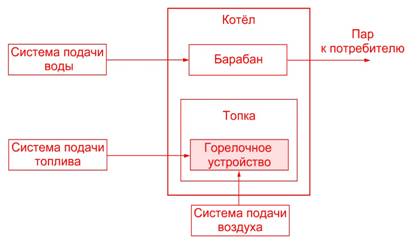

... режимов функционирования котла. Повышение экологических характеристик котельной и культуру производственного процесса. Благодаря программному управлению система автоматически отслеживает все параметры текущих процессов, реализуемых водогрейными и паровыми котлами, и управляет технологическим оборудованием, обеспечивая нормальное и безаварийное функционирование котельной установки. Кроме того, ...
0 комментариев