ОСНОВНІ ПОЛОЖЕННЯ ЩОДО РОЗРОБКИ АВТОМАТИЧНИХ СИСТЕМ КЕРУВАННЯ НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ
Задачі синтезу
Побудова функціональної схеми автоматизації змішувальної установки
Основи методу квадратур
Розрахунок оптимальних настроювань регулятора
Розрахунок перехідного процесу системи регулювання
Навигация
Побудова функціональної схеми автоматизації змішувальної установки
Автоматизування змішувальної установки на основі одноконтурних систем регулювання
27450
знаков
0
таблиц
15
изображений
3.4 Побудова функціональної схеми автоматизації змішувальної установки
Для нормальної роботи установки достатньо трьох автоматичних систем регулювання:
- АСР стабілізації рівня рідини в установці;
- АСР стабілізації концентрації на виході установки;
- АСР стабілізації витрати ![]() .
.
Для вимірювання рівня рідини в установці використаємо тензометричний рівномір типу “Сапфір-22 ДГ, який має вихідний електричний сигнал 4 ... 20 мА. Так як технологічний процес перемішування не відноситься до пожежо-вибухонебезпечних, то використаємо електричну систему приладів. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІ-законом регулювання. Вихідний сигнал рівноміра поступає на підсилювач напруги, підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
Для вимірювання концентрації речовини на виході установки використаємо кондуктометричний аналізатор з вихідним електричним сигналом 0 ... 20 мВ. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІ-законом регулювання. Вихідний сигнал аналізатора поступає на підсилювач напруги, підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
Так як витрата ![]() невелика, а рідина електропровідна, то для її вимірювання використаємо індукційний витратомір з вихідним сигналом 0 ... 1 В. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІД-законом регулювання, так як трубопровід має достатньо великий час чистого запізнення.. Вихідний сигнал витратоміра поступає на підсилювач напруги підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
невелика, а рідина електропровідна, то для її вимірювання використаємо індукційний витратомір з вихідним сигналом 0 ... 1 В. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІД-законом регулювання, так як трубопровід має достатньо великий час чистого запізнення.. Вихідний сигнал витратоміра поступає на підсилювач напруги підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
Для забезпечення нормальної роботи установки необхідно побудувати такі інформаційно-вимірювальні системи (ІВС): - витрати потоків ![]() і
і ![]() ; - концентрації
; - концентрації ![]() і
і ![]() ; - рівня
; - рівня ![]() рідини в установці.
рідини в установці.
Для побудови ІВС витратами використаємо індукційні витратоміри з вихідним сигналом 0 ... 1 В. Вторинними приладами служитимуть автоматичні потенціометри типу КСП-4.
Для побудови ІВС концентраціями використаємо кондуктометричні аналізатори з вихідним сигналом 0 ... 20 мВ. Вторинними приладами служитимуть автоматичні потенціометри типу КСП-4.
Для побудови ІВС рівня використаємо тензометричний датчик “Сапфір 22-ДГ” з вихідним сигналом 4 ... 20 мА. Вторинним приладом служитиме автоматичний міліамперметр типу А 541.
Сигналізація здійснюється за такими технологічними параметрами: рівнем ![]() в установці (мінімум і максимум - лампи Л3 і Л4); витратами
в установці (мінімум і максимум - лампи Л3 і Л4); витратами ![]() і
і ![]() (мінімум - лампи Л1 і Л2) і концентрація
(мінімум - лампи Л1 і Л2) і концентрація ![]() (лампа Л5).
(лампа Л5).
Блокування здійснюється при аварійному перевищенні рівня в установці до значення ![]() . У цьому випадку датчик 7 видає сигнал, який приводить до закриття клапанів КВ. Функціональна схема автоматизації змішувальної установки приведена на рис. 4.
. У цьому випадку датчик 7 видає сигнал, який приводить до закриття клапанів КВ. Функціональна схема автоматизації змішувальної установки приведена на рис. 4.
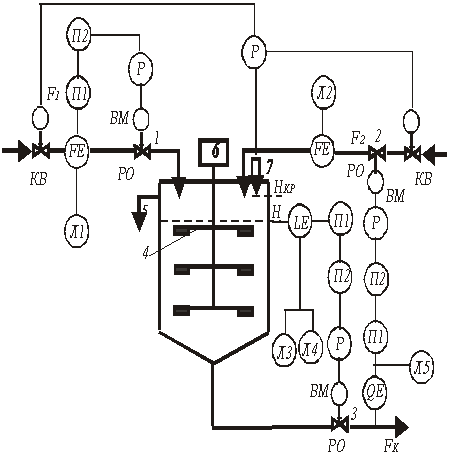
Рис. 4. Функціональна схема автоматизації змішувальної установки
3.5 Синтез автоматичної системи регулювання
3.5.1Розробка структурної схеми АСР і математичних моделей
Згідно зі завданням потрібно виконати параметричний синтез АСР рівня рідини в установці. Структурна схема одноконтурної системи стабілізації рівня рідини показана на рис. 5.
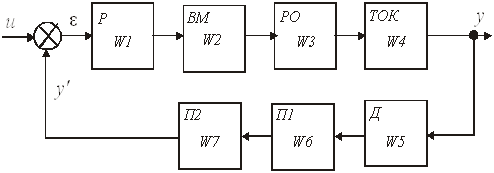
Рис. 5. Структурна схема АСР стабілізації рівня рідини.
Порядок синтезу АСР буде наступним.
1.Розробимо або виберемо передавальні функції всіх динамічних ланок АСР. Так як згідно з умовою для стабілізації рівня необхідно використати ПІ-регулятор, то його передавальна функція має вигляд ![]() , де
, де ![]() і
і ![]() - коефіцієнт підсилення та час інтегрування регулятора - є настроювальними параметрами.
- коефіцієнт підсилення та час інтегрування регулятора - є настроювальними параметрами.
Виконавчий механізм представляє собою електродвигун постійного струму. З деяким наближенням передавальну функцію для двигуна запишемо у вигляді ![]() , де
, де ![]() - коефіцієнт передачі виконавчого механізму,
- коефіцієнт передачі виконавчого механізму, ![]() - постійна часу.
- постійна часу.
Регулюючий орган, підсилювачі напруги та потужності рахуватимемо як підсилювальні динамічні ланки, для яких передавальні функції приймаємо наступними:
![]() ,
, ![]() і
і ![]() .
.
Згідно зі завданням технологічний об'єкт керування (ТОК) описується наступною передавальною функцією:
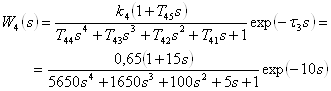 ,
,
де ![]() - коефіцієнт передачі, постійні часу та час чистого запізнення об'єкта відповідно.
- коефіцієнт передачі, постійні часу та час чистого запізнення об'єкта відповідно.
Рівень в установці вимірюється тензометричним датчиком, який можна представити підсилювальною динамічною ланкою. Тому передавальна функція датчика рівня ![]() (передавальні функції для інших датчиків вимірювання технологічних параметрів вибираються з методичних вказівок до виконання курсової роботи з дисципліни “Технологічні вимірювання та прилади”).
(передавальні функції для інших датчиків вимірювання технологічних параметрів вибираються з методичних вказівок до виконання курсової роботи з дисципліни “Технологічні вимірювання та прилади”).
2.Знаходимо еквівалентну передавальну функцію замкненої системи регулювання по каналу завдання:
![]() .
.
3.Знаходимо передавальну функцію еквівалентного об'єкта керування
![]() .
.
Підставивши в останнє рівняння вищеназвані передавальні функції, маємо

З рівняння видно, що еквівалентний об'єкт керування описується диференціальним рівнянням пятого порядку. Останнє рівняння запишемо в такій формі:
![]()
де
![]() ;
;
![]() - передавальна функція ланки чистого запізнення.
- передавальна функція ланки чистого запізнення.
Перехідний процес для еквівалентного об'єкта керування та АСР розраховуватимемо методом квадратур.
0 комментариев