ОСНОВНІ ПОЛОЖЕННЯ ЩОДО РОЗРОБКИ АВТОМАТИЧНИХ СИСТЕМ КЕРУВАННЯ НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ
Задачі синтезу
Побудова функціональної схеми автоматизації змішувальної установки
Основи методу квадратур
Розрахунок оптимальних настроювань регулятора
Розрахунок перехідного процесу системи регулювання
Навигация
Розрахунок оптимальних настроювань регулятора
Автоматизування змішувальної установки на основі одноконтурних систем регулювання
27450
знаков
0
таблиц
15
изображений
3.5.3 Розрахунок оптимальних настроювань регулятора
Розрахунок оптимальних настроювань регулятора виконаємо метод трикутника. Для цього використаємо криву перехідного процесу еквівалентного об'єкта керування показану на рис. 7. В області максимальної чутливості об'єкта побудуємо трикутник як показано на рис. 8 і знайдемо швидкість його руху за формулою: ![]() .
.
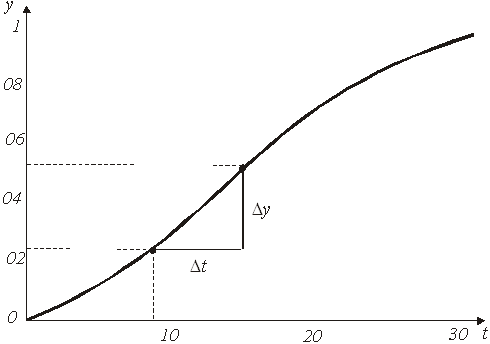
Рис. 8. Визначення оптимальних параметрів регулятораметодом трикутника
Максимальна швидкість наростання перехідного процесу ![]() . Так як згідно зі завданням для регулювання використовується ПІ-регулятор, то оптимальні настроювання регулятора знаходимо за формулами: оптимальне значення коефіцієнта регулювання
. Так як згідно зі завданням для регулювання використовується ПІ-регулятор, то оптимальні настроювання регулятора знаходимо за формулами: оптимальне значення коефіцієнта регулювання ![]() ; час інтегрування
; час інтегрування ![]() .
.
3.5.4 Розрахунок частотних характеристик АСР
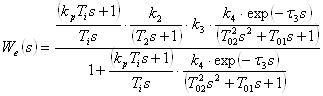
Передавальна функція еквівалентного об'єкта керування
![]() .
.
Передавальна функція замкненої АСР має вигляд
![]() ,
,
де ![]() - передавальна функція регулятора.
- передавальна функція регулятора.
Так як згідно зі завданням для регулювання використовується ПІ-регулятор, то з врахуванням передавальних функцій динамічних ланок маємо
 .
.
Після відповідних перетворень одержуємо
 ,
,
де ![]() - коефіцієнт передачі АСР.
- коефіцієнт передачі АСР.
Замінимо ![]() , а через формулу Ейлера запишемо функцію
, а через формулу Ейлера запишемо функцію ![]() і приведемо рівняння до наступного вигляду
і приведемо рівняння до наступного вигляду
![]() ,
,
де ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Після відповідних перетворень отримуємо
![]() ,
,
де ![]() ;
; ![]() ;
;
![]() ;
;
![]() .
.
Частотні характеристики АСР дорівнюють: дійсна –
![]() ; уявна -
; уявна - ![]() ; амплітудна -
; амплітудна - ![]() .
.
Розрахуємо коефіцієнти для поліномів частотних характеристик:
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
![]() ;
;
![]() ;
;


Дійсна частотна характеристика показана на рис. 9, уявна – на рис. 10, а амплітудна – на рис. 11.

Рис. 9. Дійсна частотна характеристика АСР.
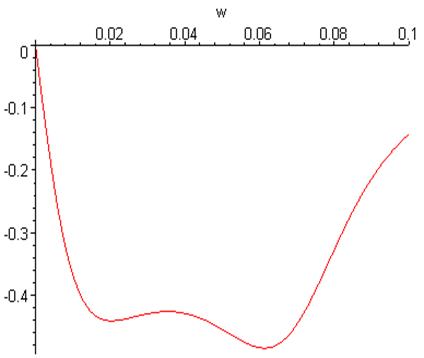
Рис.10. Уявна частотна характеристика АСР.
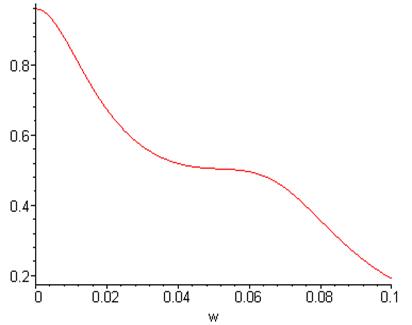
Рис. 11. Амплітудна частотна характеристика АСР.
0 комментариев