Навигация
Оценка влияния погрешности гирокомпасов на точность судовождения
19098
знаков
17
таблиц
0
изображений
4. Оценка влияния погрешности гирокомпасов на точность судовождения.
4.1 Оценка возможной погрешности определения места судна по двум пеленгам.
Задание 2.1.(А)
A. Работа с гирокомпасом «Курс-4».
Расстояние между ориентирами L=(20+0.1·m)=20+0,1·14= 21.4 (мили);
Азимут ориентиров А12=(10·n+m)=10·13+14= 144˚;
ГКП1=A12+130-n=144+130-13=269˚;
ГКП2=A12+50+n=144+50+13=207˚.
В качестве момента времени tоб, по заданию, выбираем время 1-го экстремума кривой суммарной инерционной погрешности. tоб = te1=2610 c, δj(tоб) = -0,1˚. (Из задания 1.А.)
Порядок выполнения следующий:
В произвольном масштабе наносим ориентир O1 и строим относительно него ориентир O2(по азимуту A12 и расстоянию L).
Прокладываем на плане линии компасных пеленгов ориентиров ГКП1 и ГКП2 , пересечение которых дает точкуM1.
Используя график суммарной инерционной погрешности, полученной в задании, на момент времени tоб находим величины суммарной инерционной погрешности.
Так,
tоб = te1=2610 c, δj(tоб)= -0,1˚
Рассчитываем значения истинных пеленгов ориентиров ИП1 и ИП2, исправляя значения ГКП1 и ГКП2 поправкой δj(tоб) по формуле:
ИП1= ГКП1 + δj(tоб) = 261˚ -0,1˚= 260,9˚
ИП2= ГКП2 + δj(tоб) = 207˚ -0,1˚= 206,9˚
На плане прокладываем истинные пеленга ИП1 и ИП2 и, таким образом, получаем истинное место суднаM2.
Оцениваем погрешность, допущенную в данном определении места судна, выражаемую в линейных единицах (милях) расстоянием r между точками M1 и M2.
Полученное значение r= миль.
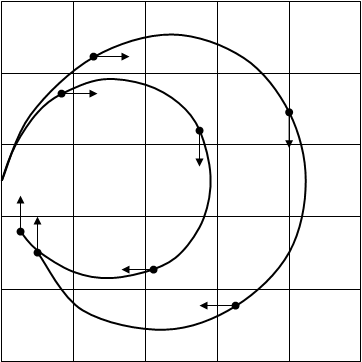
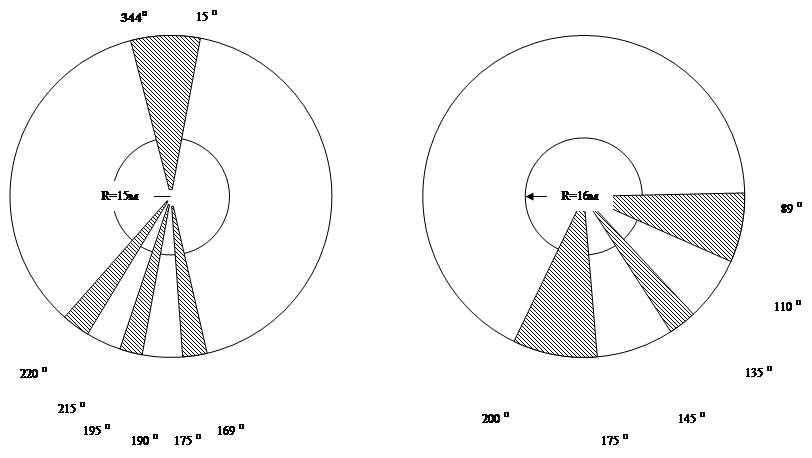
Графическое решение задачи А предоставлено на рис. 1.3
Б. Работа с гирокомпасом «Вега».
Порядок выполнения аналогичен указанному в пункте (А), за исключением того, что значение суммарной инерционной погрешности определяется по кривой суммарной инерционной погрешности для гирокомпаса «Вега», полученной в задании 1.(Б).
Так, tоб = te1=180 c, δj(tоб)= 4.3˚
Графическое решение задачи осуществляется по образцу рисунка 3 Рассчитываем значения истинных пеленгов ориентиров ИП1 и ИП2, исправляя значения ГКП1 и ГКП2 поправкой δj(tоб) по формуле:
ИП1= ГКП1 + δj(tоб) = 261˚ +4.3˚= 265.3˚
ИП2= ГКП2 + δj(tоб) = 207˚ +4.3˚= 211.3˚
Погрешность, допущенная при определении места судна, аналогично определяется ) расстоянием r между точками M1 и M2.
Полученное значение r= миль.
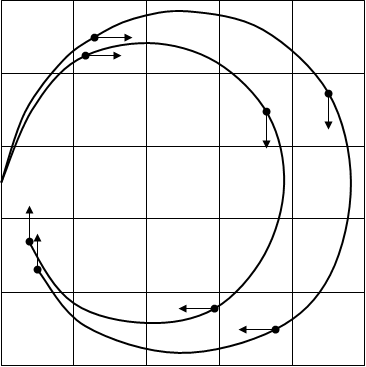
Графическое решение задачи Б предоставлено на рис. 1.4
4.2 Оценка погрешностей определения поправки гирокомпаса
Задание 2.2.(А)
Произвести оценку погрешности определения поправки гирокомпаса по створу после маневра судна.
A. Определение поправки гирокомпаса «Курс-4».
Исходные данные:
V’1=V1+5= 23+5=28 уз.;
V’2=V2-5= 24+5=19 уз.;
ГКК’1=180˚+(-1)n·m=180-14=166˚;
ГКК’2=360˚+(-1)m·n=360+13=373˚=13˚;
tΔГК = 0 сек.
ΔVN= -23.6 м/с-1
Порядок выполнения такой:
Используя кривую суммарной инерционной погрешности δj для гирокомпаса «Курс-4», полученную в задании 1.(A), выбираем значение суммарной инерционной погрешности на момент времени tΔГК= 0, δj=0. Рассчитываем значение изменения северной составляющей скорости судна:
ΔV’N=V’2·cosГКК’2-V’1·cosГКК’1=19·0.99-28·0.99=18.81-27.72= -8.91 (м/с-1)
Определяем фактическую величину погрешности δ j(tΔГК)ф , учитывая изменившееся значение ΔV’N по отношению к ΔVN для задания 1.(A), пересчет производится по формуле:
δ j(tΔГК)ф= δ j(tΔГК)·(ΔV’N/ΔVN),
δ j(tΔГК)ф=2.9·(-8.91/-23.6)=1˚
Величина погрешности εΔГК, допущенной при определении величины поправки гирокомпаса в момент времени tΔГК определяется по формуле:
εΔГК= -δ j(tΔГК)ф= -1˚
Полученные данные представим в таблице 3.
Таблица 3
| tΔГК,сек | φ,˚ | V’1,уз. | V’2, уз. | ГКК’1,˚ | ГКК’2,˚ | ΔV’N, м/с-1 | δ j(tΔГК)ф,˚ | εΔГК,˚ |
| 0 | 50 | 28 | 19 | 166 | 13 | -8.91 | 1 | -1 |
Б. Определение поправки гирокомпаса «Вега».
Исходные данные такие же, как и в задании 1.(Б).
Порядок выполнения остается таким же, как и в предыдущем пункте, за исключением: значение δ j(tΔГК) выбирается по графику суммарной инерционной погрешности для гирокомпаса «Вега». Пункт 2 не выполняется, полагая δ j(tΔГК)= δ j(tΔГК)ф .
Таким образом, εΔГК= 0,1˚.
Похожие работы
... 6765$ 2.9 Расчет рамки и сетки карты графического плана переход Результаты всей предыдущей работы по навигационному проектированию переоформляем в виде графического плана перехода на двух листах формата А-1. Первый из листов охватывает в мелком масштабе (1:2000000) весь переход (от порта Малага до порта Неаполь), а второй – крупномасштабный () сложный участок перехода. Для построения ...
... колебаний чувствительного элемента до 150 мин и использованием индикатора горизонта с нелинейной характеристикой. Точность показаний прибора в режиме гироазимута при скорости судна до 70 уз характеризуется дрейфом ±1,0 град/ч в широтах до 70° и ±1,5 град/ч в широтах от 70 до 80°. Рабочая температура поддерживающей жидкости гироазимуткомпаса «Вега» составляет 73°С, поэтому гирокомпас не ...
... карт с изолиниями системы LORAN-C, это облегчает судоводителю работу по обсервациям в Эгейском, Ионическом море, и также обеспечит определение места судна с требуемой точностью и периодичностью. 1.5 Сведения о портах ПОРТ ОДЕССА Порт Одесса - один из крупнейших портов Украины - оборудован в Одесском заливе, находящемся в северо-западной части Чёрного моря. К нему примыкает город Одесса - ...
... 5о. при перевозке ферромагнитных грузов допускается использование временной таблицы девиации. Гирокомпас готовят согласно Правилам технической эксплуатации и соответствующей инструкции. Запускают его заблаговременно, не позже, чем за 6 часов до отхода судна. Постоянная поправка гирокомпаса определяется: после длительной стоянки судна, смены гиросферы или поддерживающей жидкости в основном приборе ...
0 комментариев