Определение общего передаточного отношения привода и разбивка его по ступеням
Проектировочный расчёт валов, выбор подшипников и определение межосевых расстояний с учётом габаритов подшипников
Определение межосевых расстояний с учётом габаритов подшипников
РАСЧЁТ ЗУБЧАТЫХ ПЕРЕДАЧ И ВЫБОР МАТЕРИАЛОВ
Выбор поверхностного и объёмного упрочнения и проверочный расчёт зубьев колёс
ПРОВЕРОЧНЫЙ РАСЧЁТ УЗЛОВ И ДЕТАЛЕЙ
Проверочный расчёт конических подшипников опор
Навигация
Проверочный расчёт конических подшипников опор
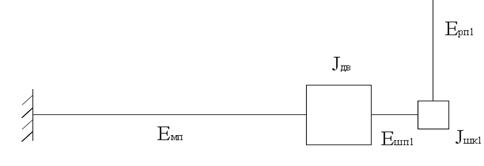
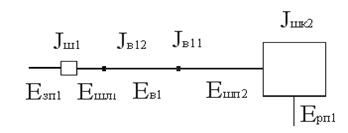
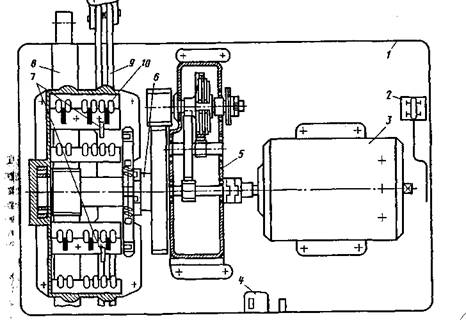
Узел редуктора электромеханического привода
28628
знаков
6
таблиц
5
изображений
3.1 Проверочный расчёт конических подшипников опор
Проверочный расчёт конических подшипников опор промежуточного вала выполняется по динамической грузоподъёмности.
А. Критерий надёжности подшипников качения по усталостной прочности тел качения имеет вид
С £ С п , (3.12)
где С – расчётная динамическая грузоподъёмность, С п – паспортная динамическая грузоподъёмность данного подшипника.
Расчётная динамическая грузоподъёмность С определяется по следующей зависимости
С = Р [L/ (a1 a2)] 1/p, (3.13)
где Р – эквивалентная нагрузка данного подшипника, Н;
L - ресурс, млн. оборотов вала; примем
L = 60 nпв Lh/ 106 = 60∙80∙8000/106 = 38.4 млн. об., (3.14)
где nпв – частота вращения промежуточного вала в об/мин; Lh - ресурс редуктора в часах;
р – показатель степени, р =10/3 для роликовых подшипников;
a1– коэффициент надёжности:
Надёжность ............. 0,9 0,95 0,96 0,97 0,98 0,99
Коэффициент a1..........1 0,62 0,53 0,44 0,33 0,21;
a2– коэффициент, учитывающий условия эксплуатации, для конических роликоподшипников в обычных условий a2 =0,6 .. 0,7 и для
и для подшипников из высококачественных сталей при наличии гидродинамической плёнки масла без перекосов a2 = 1,1 ..1,3.
Примем a1 =1 и a2 =0,7.
Б. Эквивалентная динамическая нагрузка определяется
для А – опоры
P A= (X FrA +YFxА)K б K т, (3.15)
для В - опоры
PВ= (X FrВ+YFxВ)K б K т, (3.16)
где FrA и FrВ – радиальные силы, действующие на А - опору и В – опору; FxА и FxВ– осевые силы, действующие на А -опору и В – опору;
X и Y – коэффициенты, учитывающие влияние соответственно радиальной и осевой составляющих реакции в данной опоре (определяются по каталогу подшипников раздельно для каждой опоры);
K б – коэффициент безопасности, при спокойной нагрузке K б =1, при умеренных толчках K б =1,3 ...1,5, при ударах K б =2,5 ...3;примем K б =1,3.
Kт – температурный коэффициент (для подшипников из стали ШХ15); примем
Kт =1 при рабочей температуре до 100°С.
Параметр осевой нагрузки е указан в каталоге подшипников, e = 0,68
SА = e∙FrА = 0,68∙0.83·![]() = 2520.839 Н (3.17)
= 2520.839 Н (3.17)
SВ = e∙FrВ = 0,68*0.83*![]() = 7620 Н (3.18)
= 7620 Н (3.18)
|
Fxа = Fx + SA = 1960 + 425 = 2385 Н
S = SA+ Fx - SB = (3.19)
=2520.839 +4456.125 – 7620 = -643.086 < 0,
значит вал сместится в сторону левой опоры, следовательно
FxB= SВ = 7620 Н.
Определим силу FxА из уравнения равновесия вала
FxА = SB -Fx ; (3.20)
FxА = 7620-4456 = 3164 Н.
Т.к. ![]() = 3164/4466.405= 0.7084 ≥ e = 0,68 , принимаем X = 0,41, Y = 0,87.
= 3164/4466.405= 0.7084 ≥ e = 0,68 , принимаем X = 0,41, Y = 0,87.
![]() = 7620/13501.15= 0,564< e = 0,68 , принимаем X = 1, Y = 0.
= 7620/13501.15= 0,564< e = 0,68 , принимаем X = 1, Y = 0.
Подставив найденные значения в формулы (3.15) и (3.16), найдем эквивалентную динамическую нагрузку для опор A и B
PA= (0,41∙4466.405 + 0,87∙3164)∙1,3∙1 = 5959 Н,
PB= (0 + 1∙13501.15)∙1,3∙1 =17551.495 Н.
Подставив PB , так как для тихоходной больше нагрузки, то в формулу (3.13), определим расчётную динамическую грузоподъёмность С
C =17551.495∙(![]() )0,3 = 58.34 кН £ Сп = 80.2 кН
)0,3 = 58.34 кН £ Сп = 80.2 кН
Критерий надёжности подшипников качения по усталостной прочности тел качения выполняется.
Заключение
1. Для обеспечения требуемого крутящего момента и частоты вращения на выходном валу необходимо использовать асинхронный электродвигатель переменного тока 4А160S2
2. Для обеспечения ресурса тихоходной зубчатой передачи необходимо изготовить её из стали 20ХФ с твердостью зубьев 55 HRC и использовать цементацию + закалку и низкий отпуск в качестве термообработки. Для обеспечения ресурса быстроходной зубчатой передачи её необходимо изготовить из стали 40Х с твердостью зубьев 35 HRC и использовать объемную закалку.
3. На промежуточном валу следует установить подшипники ГОСТ 7308.
4. Для крепления крышек подшипниковых узлов следует использовать болты Болт М14 для тихоходной и быстроходной передач.
5. Для соединения выходной вал – муфта необходимо использовать шпоночное соединение.
ЛИТЕРАТУРА
1. Правила оформления студенческих выпускных работ и отчётов/ Сост.: Г.П. Голованов, К.К. Гомоюнов, В.А. Дьяченко, С.П. Некрасов, В.В. Румянцев, Т.У. Тихомирова; Под ред. В.В. Глухова. СПб.: Изд-во СПбГТУ, 2002. 32 с.
2. Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин: Учеб. пособие для техн. спец. вузов. - м.: Высш. шк., 1998. 447 с., ил.
3. Курсовое проектирование деталей машин: Учеб. пособие... / С.А. Чернавский, К.Н. Боков, И.М. Чернин и др. М.: Машиностроение, 1988. 418 с., ил.
4. Справочник металлиста /Под ред. С.А. Чернавского и В.Ф. Рещикова. М.: Машиностроение, 1976. В 5-ти т. Т.1.768 с.
5. Иванов М.Н. Детали машин: Учеб. для студентов втузов / Под ред. В.А. Финогенова. М.: Высш. шк., 1998. 383 с., ил.
6. Детали машин: Справочные материалы по проектированию/ Сост. Ю.Н. Макаров, В.И. Егоров, А.А. Ашейчик, Р.Д. Макарова, 1995. 75 с.
![]() 7. Детали машин: разработка и оформление конструкторской документации курсового проекта/ В.И. Егоров, Е.В. Заборский, В.И. Корнилов и др., 2003. 40
7. Детали машин: разработка и оформление конструкторской документации курсового проекта/ В.И. Егоров, Е.В. Заборский, В.И. Корнилов и др., 2003. 40
Похожие работы
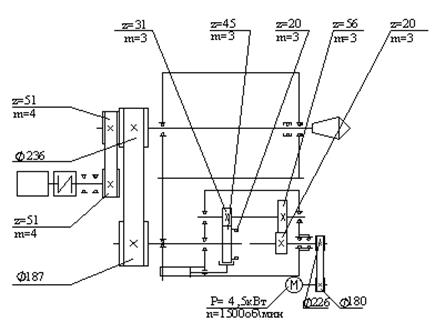
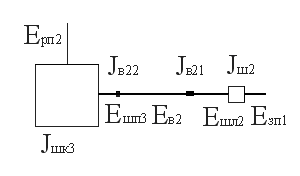
... двигателя и добиваемся его реализации путем изменения числа зубьев в приводе, сохраняя при этом общее число зубьев в сумме. На рисунке 1 приведена принципиальная кинематическая схема привода главного движения станка с учетом индивидуального задания, согласно которому общее передаточное отношение . Рисунок 1 – Кинематическая схема привода 1.1.2 Выбор двигателя Для выбора двигателя ...

... потребителей с использованием газотурбинных установок малой мощности. Компания поддерживает деловые связи с зарубежными фирмами, производителями энергетического оборудования. 1. МОЩНОСТЬ ГТЭС Газотурбинная электростанция (ГТЭС) предназначена для обеспечения электроэнергией объектов нефтедобычи. Режим работы ГТЭС постоянный параллельно с энергетической системой. Потребность в ...
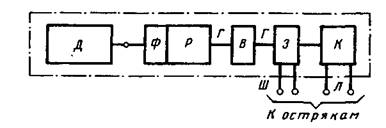
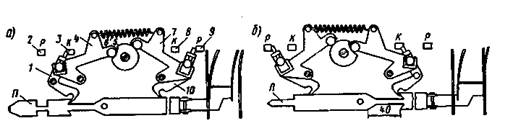
... работу и надежностью механизма. Появилась тенденция к более широкому применению электрогидравлических приводов с замкнутой гидравлической системой (с насосом). Несмотря на многообразие конструкций электромеханических стрелочных электроприводов (СЭП) их структурные схемы идентичны. Это объясняется тем, что любое устройство, осуществляющее перевод стрелочных остряков, должно иметь четыре режима ...
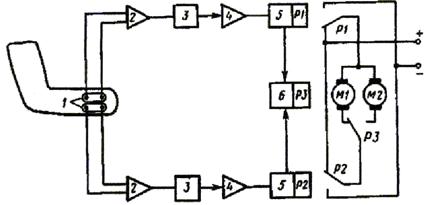
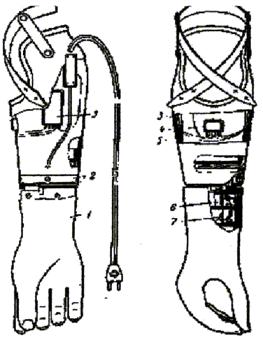
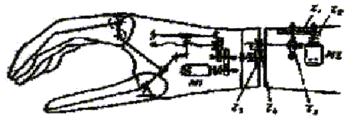
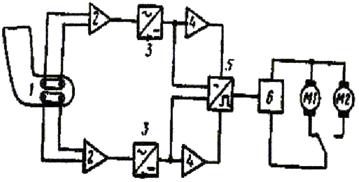
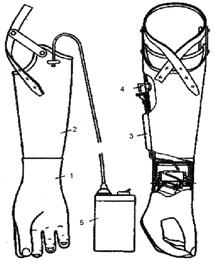
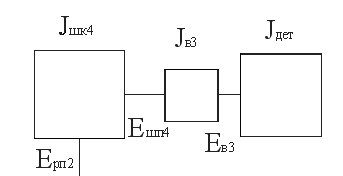
... электродвигатель. Редуктор состоит из двух ступеней зубчатой передачи Zi и Z2 (рис. 3), самотормозящейся винтовой пары Z3 и зубчатой передачи с внутренним зацеплением Z4,Z5. Рис. 2 Протез предплечья с биоэлектрическим управлением с двумя функциями Максимальный вращающий момент привода составляет 0,5 - 5 Н*м; число поворотов — не менее 15 об/мин; масса протеза не превышает 1,2 кг. Рис. ...
0 комментариев