Вторая экваториальная система сферических координат светил
Порядок нахождения и опознания навигационных созвездий и светил
Годовое движение Солнца. Видимое движение Луны. Фазы и возраст Луны
Часовые пояса. Поясное время. Его связь с всемирным (Гринвичским). Линия перемены дат
Вращением регулировочных винтов малого зеркала торцевым ключом совместить отраженное изображение светила с прямовидимым (Рис. 5.12)
Назначение и содержание морского астрономического ежегодника (МАЕ)
Определение места судна по одновременным измерениям высот светил
Определение поправки компаса по небесным светилам
Определение обсервованной широты места судна по меридиональной высоте Солнца
Назначение, принцип действия, состав, основные ТТХ среднеорбитых СНС. Принцип получения навигационного параметра
Пространственная прямоугольная система координат. Взаимосвязь местоположения и скорости судна от расстояний до НИСЗ
Получение места судна по измеренным азимутам светил
Навигация
Получение места судна по измеренным азимутам светил
Мореходная астрономия
69837
знаков
5
таблиц
15
изображений
45. Получение места судна по измеренным азимутам светил
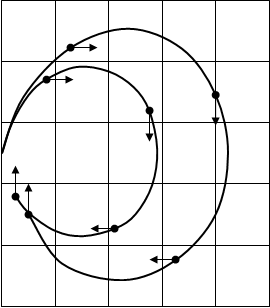
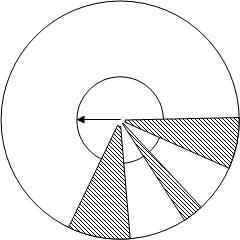
Азимутальная линия положения. Измеренному азимуту А соответствует на земном шаре изолиния РnМδ, называемая изоазимутой (рис. 6.7). Текущие координаты места судна М (φ, λ), координаты географического места светила σ (tгр, δ) и азимут А связывает уравнение изоазимуты:
ctg A = cos φ tg δ cosec tм - sin φ ctg tм. (6.11)
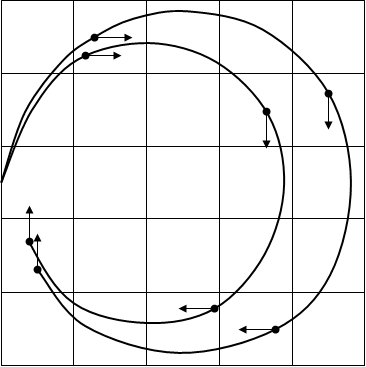
Малый отрезок изоазимуты в районе счислимого места С (рис. 6.8), совпадающий с прямой линией 1-1, является азимутальной линией положения (АЛП), уравнение которой имеет вид: cos τАΔ φ + sin τАΔω = (А-Ас)/gА, (6.12)
где - τА - угол, определяющий направление градиента азимута в счислимом месте; - Ас - счислимый азимут; - gA - модуль градиента азимута, выражающийся формулой:
![]() (6.13)
(6.13)
Для получения элементов АЛП необходимо 1. Измерить азимут светила и исправить его поправкой системы курсоуказания ΔK и инструментальной поправкой визирующего устройства s. Вычисляют Ас и hc Вычисляют элементы nА и τА азимутальной линии положения
46. Получение места судна по измеренным разностям азимутов светил. Разностно-азимутальная линии положения
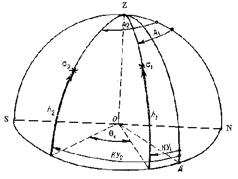
Разность азимутов двух светил может быть измерена непосредственно или найдена косвенным путем посредством измерения в один и тот же момент времени пеленгов или курсовых углов этих светил. При неодновременных измерениях пеленгов или КУ потребуется их приведение не только к одному месту, но и к одному моменту измерений, что может значительно осложнить решение. Разность азимутов ΔП=Θ, являясь астронавигационным параметром, обладает важным достоинством: в ней исключается погрешность поправки курсоуказания или погрешность установки измерительного устройства в диаметральной плоскости судна ОД (рис. 6.9), а также другие повторяющиеся погрешности измерений и исправления азимутов. Разность азимутов θ вычисляется по формуле:
Θ=А2 - А1=ИП2 - ИП1 , или Θ=КУ2 - КУ1. (6.20)
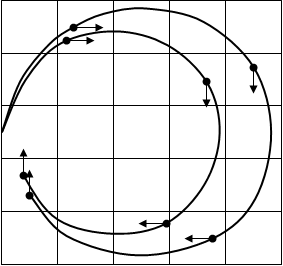
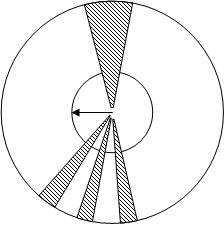
Разность азимутов Θ является углом на сфере между вертикалами светил, которому соответствует сферическая изогона - изолиния, аналогичная изоазимуте (рис. 6.7), если принять одно из светил находящимся над точкой Рn.
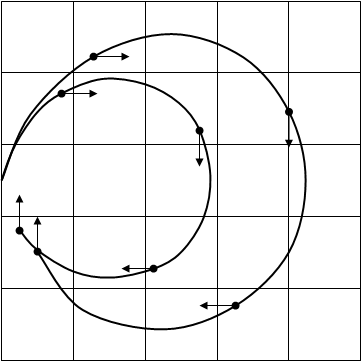
Разностно-азимутальная линия положения (РАЛП) является малым отрезком сферической изогоны в районе счислимого места С, принимаемым совпадающим с прямой линией (рис. 6.10). Элементы РАЛП nΘ и τΘ вычисляют по формулам:
 ;(6.21)
;(6.21)
 , (6.22)
, (6.22)
где Θс=Aс2 – Ас1 - счислимая разность азимутов в момет измерения азимутов (курсовых углов); gΘ - модуль градиента разности азимутов, определяемый графически (рис. 6.10) или по формуле:
![]() ,
,
47. Получение места судна по измеренным разностям высот светил. Разностно-высотная линии положения
Если в один и тот же момент времени были получены (рис. 6.9):
- для светила σ1 - высота h1 и азимут А1 (или КУ1),
- для светила σ2 - высота h2 и азимут А2 (или КУ2),
То задача определения обсервованных координат места судна в принципе сводится к отысканию точки пересечения сферической гиперболы I-I, отвечающей параметру h2-h1=Δh (разностно-высотной линии положения - РВЛП), и сферической изогоны II-II (разностно-азимутальной линии положения - РАЛП), отвечающей параметру Θ=А2-А1 (рис. 6.13). Практически решение выполняется одним из следующих методов:
1. Отыскивается точка пересечения М разностно-высотной линии положения (РВЛП) 1-1 и разностно-азимутальной линии положения (РАЛП) 2-2, как это показано на рис. 6.14. Элементами линий положениям соответственно являются:
 ,
,
Затем оценивается их точность и вычисляются веса обсервованных мест. С учетом этих весов находится вероятнейшее место, лежащее на прямой между исходными обсервованными точками.
48. Назначение, состав, принцип получения навигационных параметров в астронавигационной системе (АНС)
- Астронавигационные системы (АНС) - оптические, фотоэлектрические и телевизионные системы, предназначенные для автоматического измерения высот и азимутов (разности азимутов) оптически видимых небесных светил и слежения за ними.
Астронавигационная система (АНС) - это комплекс взаимосвязанных приборов и систем, предназначенных для автоматического или полуавтоматического измерения астронавигационных параметров (высот, азимутов, курсовых углов светил и скоростей их изменения) с целью автоматизированного определения обсервованных координат места и поправки курсоуказания. По принципу действия и построения эти системы можно подразделить на:
- оптические АНС, принимающие излучения светил в оптическом диапазоне частот;
- радиоастрономические навигационные системы (или радиосекстаны), принимающие сигналы естественных и искусственных источников космического радиоизлучения (ИКР);
- комбинированные системы, представляющие собой комбинацию первой и второй систем. Структурно-функциональная схема типовой комбинированной АНС без элементов гироскопической стабилизации изображена на рис. 12.11. Для наведения приемных устройств АНС, размещенных в головной части измерительного устройства ИУ на гиростабилизированной в плоскости истинного горизонта платформе ГСП, СЦВМ автоматически подбирает несколько групп светил (в том числе и ИСЗ) для наблюдений на заданные дату Д, всемирное время наблюдений Тгр и счислимые координаты места судна. Судоводителем с пульта задается избранное наименование светила (группы светил) или номер искусственного спутника Земли Nсв для наблюдений. Из системы автоматического счисления (навигационного комплекса или) в СЦВМ через аналоговое вычислительное устройство (АВУ) вводятся счислимые координаты места судна, его курс и скорость. По этим данным СЦВМ вычисляет углы наведения приемных устройств на светило или ИКР по высоте hн=hc, и по азимуту
qн = qc =Ac - КК,
Которые через АВУ поступают на приводы наведения по высоте и курсовому углу.
Приемным устройством для светового излучения является телескоп Тл, сопряженный с приемной телевизионной камерой или фотоэлементом, а для радиоизлучения - антенна Ант с остронаправленной диаграммой приема. Чтобы выделить слабое световое или космическое радиоизлучение объекта наблюдения на фоне атмосферного излучения и помех, производится модуляция принимаемого светового потока или радиосигнала. Световой поток прерывается полупрозрачным вращающимся диском, а радиосигнал модулируется сканированием (вращением) диаграммы направленности антенны. В результате модуляции принимаемого излучения образуется линия визирования телескопа и равносигнальное направление РНС антенны. Если эти линии точно направлены на светило или ИКР, то в фото (оптико-телевизионном) блоке или радиоприемном устройстве электрических сигналов рассогласования не возникает. При отклонении указанных линий от направления на светило или ИКР возникает сигнал рассогласования ер с частотой модуляции, фаза которого зависит от стороны, а амплитуда – от угла отклонения. Фазы сигналов рассогласования по высоте е h и курсовому углу е q отличаются друг от друга на p/2- или 90°. Это обстоятельство позволяет в фазовых дискриминаторах, куда дополнительно подаются сдвинутые по фазе на 90° опорные напряжения Uоп от модуляционных устройств, из общего сигнала рассогласования выделить электрические сигналы рассогласования по высоте еh и курсовому углу еq, пропорциональные ошибкам наведения приемных устройств на светило или ИКР. Блоки коррекции по этим сигналам вырабатывают поправки Dh и Dq к исчислимым горизонтным координатам светил. Поправки суммируются со исчислимыми высотой и курсовым углом и через приводы наведения корректируют положение приемных устройств до тех пор, пока сигнал рассогласования ер не станет равным нулю, т.е. пока линия визирования телескопа или ось РНС не будут направлены на светило или ИКР. Блоки считывания высоты и курсового угла автоматически снимут фактические высоту hпр и курсовой угол qпр светила или ИКР. Они исправляются инструментальными поправками Dhu и Dqu, вычисляемыми в блоках выработки поправок. Измеренные высота hизм =hпр+Dhи и курсовой угол qизм=qпр+Dqи светила или ИКР через АВУ поступают в СЦВМ, где высота автоматически исправляется поправкой за рефракцию или радиорефракцию и рассчитывается компасный пеленг
КП=Акр=qизм+КК.
СЦВМ автоматически вычисляет поправки к счислимым координатам Djо и Dlо, поправку курсоуказания DК, обсервованные координаты места jо и lо, эллиптическую и радиальную СКП обсервованного места Мо. После анализа и утверждения их судоводителем они с пульта управления передаются в систему автоматического счисления (навигационный комплекс или систему электронной картографии). В современных АНС, особенно если они сопряжены с высокоточными гироскопическими приборами и системами (гироазимутами - ГА, гировертикалями - ГВ, гирогоризонтами – ГГ, гироазимутгоризонтами - ГАГ, инерциальными навигационными системами - ИНС), вырабатывающими направление компасного меридиана и плоскость горизонта, могут быть реализованы практически все рассмотренные в главе 6 способы определения места судна - высотный, азимутальный, разностно-высотный, разностно-азимутальный, высотно-разностно-азимутальный, скоростно-высотный и скоростно-азимутальный и другие.
Похожие работы
... “Плоды нашей владивостокской морской школы” и стали одной из основ этой самой почвы – на все грядущие 110 лет. 5. ПОЛОЖЕНИЕ ОБ АЛЕКСАНДРОВСКИХ МОРЕХОДНЫХ КЛАССАХ В г. ВЛАДИВОСТОКЕ 7 апреля 1890 г. § 1. Мореходные классы в г. Владивостоке учреждаются городским обществом на основании высочайше утвержденного 27 июня 1867 г. Положения о мореходных классах для преподавания в оных ...
... изучающая вопросы судовождения. Навигация – ведущий предмет среди других наук судовождения. Она разрабатывает основы судовождения, учёта движения судна в море, который обеспечивает безопасность плавания. Кроме того, рассматривает целый комплекс вопросов: основные понятия о Земле; способы определения мореплавателем основных направлений и расстояний на поверхности Земли; методы определения поправок ...
... достаточное количество карт с изолиниями системы LORAN-C, это облегчает судоводителю работу по обсервациям в Эгейском море, и также обеспечить определение места судна с требуемой точностью и периодичностью. 1.5 Сведения о портах Порт Южный ПОРТ ЮЖНЫЙ оборудован в Аджалыкском лимане в 4,2 мили к ENE от мыса Дофиновский. В лимане ведутся гидротехнические и дноуглубительные работы по дальнейшему ...
... содержит достаточное количество карт с изолиниями системы LORAN-C, это облегчает судоводителю работу по обсервациям в Средиземном море, и также обеспечить определение места судна с требуемой точностью и периодичностью. 1.5 Сведения о портах Порт Скадовск Порт Скадовс (46006 N, 32055 E) к оборудован в Джарылгачском заливе порт имеет открытый рейд; глубины на рейде менее 15 м, к берегу они ...
0 комментариев