Навигация
Динамический анализ механизмов
13216
знаков
0
таблиц
4
изображения
Содержание
Введение
1. Задачи динамического исследованиямеханизмов
2. Силы в механизмах
3. Силы инерции
4. Кинетостатический расчет механизмов
5. Теорема Н.Е. Жуковского
Литература
механизм сопротивление инерция кинетостатический
Введение
Тема контрольной работы «Динамический анализ механизмов» по дисциплине «Теория механизмов и машин».
Цель: формирование знаний динамического анализа механизмов.
Задачи: ознакомится с методами динамического анализа механизмов.
В работе рассмотрены вопросы темы:
- Задачи динамического исследования механизмов;
- Силы в механизмах;
- Силы инерции;
- Кинетостатический расчет механизмов;
- Теорема Н.Е.Жуковского о жестком рычаге.
1. Задачи динамического исследования механизмов
Основными задачами динамики механизмов являются:
1) определение сил, действующих в кинематических парах механизма;
2) определение сил трения и их влияние на работу механизма;
3) определение закона движения механизма, находящегося под действием определенных сил;
4) выявление условий, обеспечивающих заданный закон движения механизма;
5) уравновешивание механизмов.
Для решения первой задачи проводится силовое исследование механизма.
2. Силы в механизмах
Основными силами, определяющими характер движения механизма, являются движущие силы, совершающие положительную работу, и силы полезного (производственного) сопротивления, возникающие в процессе выполнения механизмом полезной работы и совершающие отрицательную работу. К движущим силам относятся: сила давления рабочей смеси на поршень цилиндра двигателя, момент, развиваемый электродвигателем на ведущем валу насоса или компрессора и т.д.
Силы полезного сопротивления – это те силы, для преодоления которых предназначен механизм. Такими силами являются: силы сопротивления резанию в токарном станке и т.д. Кроме этих сил необходимо учитывать также силы сопротивления среды, в которой движется механизм, и силы тяжести звеньев, производящие положительную или отрицательную работу в зависимости от направления движения центра тяжести звеньев – вниз или вверх.
При расчете механизма все движущие силы полезного сопротивления должны быть заданы – так называемые задаваемые силы. Задаются эти силы обычно в виде механических характеристик.
Механической характеристикой двигателя или рабочей машины называют зависимость момента, приложенного к ведомому валу двигателя или ведущему валу рабочей машины, от одного или нескольких кинематических параметров. Механические характеристики определяют экспериментальным путем или же при помощи различных математических зависимостей.
При работе механизма в результате действия всех приложенных к его звеньям указанных сил в кинематических парах возникают реакции, которые непосредственно не влияют на характер движения механизма, но на поверхностях элементов кинематических пар вызывают силы трения. Эти силы являются силами вредного сопротивления.
Реакции в кинематических парах возникают не только вследствие воздействия внешних задаваемых сил на звенья механизма, но и вследствие движения отдельных масс механизма с ускорением, что может вызвать дополнительные динамические нагрузки в кинематических парах.
Поэтому, задача кинематического расчета состоит в определении реакций в кинематических парах механизмов или, иначе говоря, давлений, возникающих в местах соприкосновения элементов кинематических пар, а также в определении уравновешивающих моментов или уравновешивающих сил.
Под уравновешивающими силами или моментами понимают те неизвестные и подлежащие определению силы или моменты, приложенные к ведущим звеньям, которые уравновешивают систему всех внешних сил и пар сил и всех сил инерции и пар сил инерции.
Если в машине, в процессе работы, ускорение звеньев достигает незначительной величины, то определение реакций в кинематических парах производится из условия равномерного движения всех звеньев механизма по условиям равновесия статики:
∑ Fi=0; ∑ M (Fi)=0.
В случае, если ускорение звеньев в машине достигает значительной величины, то на звенья действуют динамические нагрузки, которыми пренебрегать уже нельзя. Для силового расчета в этом случае следовало бы составить динамическое уравнение движения, что весьма затруднительно.
Поставленную задачу можно решить, используя принцип Даламбера, согласно которому, если к звеньям механизма вместе со всеми силами приложить еще и инерционные силы, то механизм можно рассматривать находящимся в статическом равновесии, и уравнение динамики заменить уравнениями статики:
∑ Fi=0;
∑ M (Fi) + ∑ M (Fu) + Mu=0
3. Силы инерции
В общем случае плоско-параллельного движения звена ускорения его различных материальных точек различны (по величине и направлению). Поэтому различны и элементарные силы инерции ![]() , условно приложенные в этих точках. Эта система элементарных сил сводится к одной силе инерции Fu и к одной паре сил инерции с моментом Mu, которые равны:
, условно приложенные в этих точках. Эта система элементарных сил сводится к одной силе инерции Fu и к одной паре сил инерции с моментом Mu, которые равны:
где: m – масса звена;
WS - ускорение центра тяжести звена;
ε – угловое ускорение звена;
IS – момент инерции звена относительно оси, проходящей через центр тяжести.
Момент инерции звена есть мера инертности звена во вращательном движении. Его величина зависит только от самого тела: от его массы и распределения массы. Момент инерции в общем случае определяется формулой:
где: ρ – расстояние каждой элементарной массы от оси, проходящей через центр тяжести.
Сила инерции Fu приложена в центре тяжести звена S и направлена противоположно вектору ускорения центра тяжести WS.
Момент пары сил инерции направлен противоположно угловому ускорению звена ε.
Рассмотрим, к чему сводятся силы инерции при различных случаях движения звена.
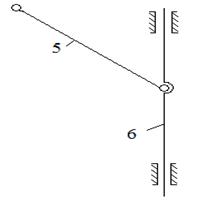
1. Поступательное движение звена (рис.1).
Ускорения всех точек одинаковы, поэтому:
![]()
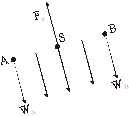
Рис.1
Приложена сила инерции в центре тяжести. Момент сил инерции звена Mu=0, т.к. при поступательном движении звена оно не имеет углового ускорения (ε=0).
2. Звено неравномерно (ε≠0) вращается вокруг оси, проходящей через центр тяжести (рис.2).
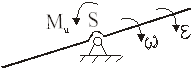
Сила инерции в этом случае равна Fu=0, т.к. ускорение центра тяжести WS=0.
Момент силы инерции равен: Mu=-IS·ε и направлен противоположно угловому ускорению ε.
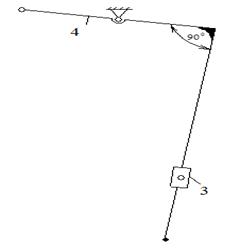
3. Звено равномерно (ε=0) вращается вокруг оси, не проходящей через центр тяжести (рис.3).
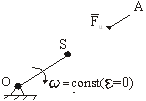
Рис.3
В этом случае: ![]() где:
где: ![]() .
.
Момент сил инерции Mu=0, так как угловое ускорение ε=0.
Похожие работы
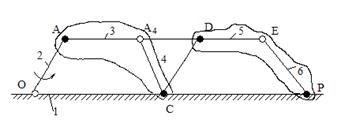
... для него план механизма. Построили диаграмму усилий, действующее на исполнительное звено, и если необходимо, построили 2 плана положений соответствующие началу и концу действия сил полезного сопротивления. Структурный анализ механизма 1. Выписываем кинематические пары определяя класс и вид 1–2 – вращ., 5 кл 2–3 – вращ., 5 кл 3–4 – поступ., 5 кл 4–1 – вращ., 5 кл 4–5 – вращ., 5 кл 5–6 – ...
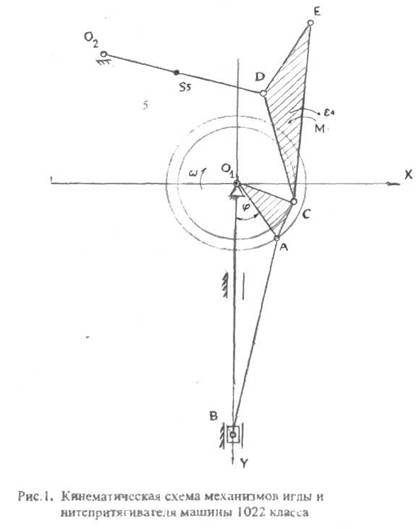
... исполнительных органов. Кинематическая схема может быть плоской или пространственной (в ортогональном или аксонометрическом изображении). На рис. I представлена плоская кинематическая схема механизмов иглы и нитепритягивателя универсальной швейной машины 1022 класса. На рис. 2 - пространственная конструктивно-кинематическая схема. Машина 1022 класса предназначена для стачивания деталей ...
... трением качения: а) платформа на катках (рис. 6.8) : f' = (k1 + k2 )/d ; (6.6) б) подшипник качения (рис. 6.9) : T = 0.5*Q*fs*d1; f' = beta*k* (1+ d1/d3) /d1 ; (6.7) для реальных конструкций подшипников beta = 1.4 - 1.6. 6.3. Коэффициенты полезного действия механизмов. 6.3.1. Коэффициент полезного действия - отношение полезной мощности на выходе Nn к мощности движущего усилия на ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
0 комментариев