Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Механизмы и несущие конструкции радиоэлектронных средств
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
Часть 1. МЕХАНИКА РЭС
Глава 1. Содержание дисциплины "механизмы и несущие конструкции радиоэлектронных средств "
Механизмы входят в состав любого радиоэлектронного комплекса, являясь частью силовых приводов, устройств регистрации и воспроизведения информации, периферийного оборудования ЭВМ, автоматических манипуляторов и т.п., а несущие конструкции (каркасы и корпуса функциональных узлов, блоков и приборов) служат для размещения на них электрорадиоэлементов и соединительных проводников, т.е. самого радиоэлектронного средства. Поэтому изучение современных методов проектирования, производства и эксплуатации механизмов и несущих конструкций необходимо каждому инженеру, специализирующемуся в области проектировния РЭС.
"Механика РЭС" - первая часть дисциплины "Механизмы и несущие конструкции РЭС" обеспечивает подготовку будущего инженера соответствующей специальности в области теоретических разделов механики, на которых базируются прикладные методы создания механизмов и несущих конструкций, их деталей и узлов, и содержит:
1. Основы теории механизмов.
2. Основы расчетов деталей механизмов на прочность, жесткость и устойчивость.
3. Элементы теории точности механизмов и основы взаимозаменяемости.
В первом разделе излагаются методы анализа и синтеза механизмов - устройств для передачи механической энергии движения и преобразования его параметров, характеристики процессов движения, в том числе колебательных. Особое внимание уделяется проектированию механизмов рациональной структуры, обеспечивающих требуемые значения кинематических и динамических параметров при минимальных потерях энергии и максимальной долговечности, т.е. наиболее полно соответствующих своему целевому назначению.
Во втором разделе рассматривается поведение элементов механизма, нагруженных внешними и внутренними усилиями - напряженное и деформированное состояния материала деталей и методы обеспечения их прочности и надежности. Используя методы этого раздела, можно выбирать свойства материалов, необходимых для изготовления деталей, добиваться рациональной формы последних, определять напряжения и деформации, возникающие при работе механизмов и несущих конструкций, т.е. в конечном счете обеспечить необходимый уровень надежности технического устройства при проектировании и эксплуатации.
Третий раздел посвящен методам обеспечения функциональной взаимозаменяемости механизмов РЭС по параметрам кинематической точности, которые в значительной степени определяют функциональную пригодность всего РЭС. Рассмотрены теоретические и экспериментальные методы определения показателей кинематической точности и способы достижения их заданных значений при проектировании и изготовлении механизмов.
В развитие механики и методов проектирования механических конструкций и механизмов значительный вклад внесли русские и советские ученые: П. Л. Чебышев, Н. Е. Жуковский, Л. В. Ассур, С. П. Тимошенко, И. И. Артоболевский, Н. И. Колчин, В. А. Гавриленко, В. И. Феодосьев, Г. С. Писаренко, Н. Г. Бруевич, Л. И. Якушев, Б. А. Тайц, Л. Н. Решетов, Ф. В. Дроздов, В. В. Кулагин, С. О. Доброгурский, О. Ф. Тищенко и многие другие. Развитие этих методов продолжается и в настоящее время, в особенности с появлением новых возможностей создания оптимальных конструкций благодаря применению систем автоматизированного проектирования, использующих ЭВМ.
Особенность современного этапа развития механических устройств РЭС - увеличение интенсивности нагрузок вследствие миниатюризации аппаратуры, замена вычислительных механизмов электронными устройствами, использование механизмов с особыми кинематическими характеристиками (периферийное оборудование ЭВМ, лентопротяжные и сканирующие механизмы систем регистрации и воспроизведения информации), широкое применение автоматизированного проектирования.
Вопросы, рассматриваемые в настоящем учебном пособии, подробно изложены в следующей учебной и справочной литературе:
РАЗДЕЛ 1. ОСНОВЫ ТЕОРИИ МЕХАНИЗМОВ
Глава 2. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
2.1. Основные понятия и определения.
Механизм, или передаточный механизм - это устройство для передачи механической энергии движения с преобразованием ее параметров от источника (двигателя, датчика, человека-оператора) к потребителю - устройству, для функционирования которого необходима энергия в виде механического перемещения.
Теория механизмов - наука, изучающая методы анализа и синтеза механизмов. Методам анализа посвящены три раздела:
а) структурный анализ;
б) кинематический анализ;
в) динамический анализ.
Синтез механизма проводится с использованием результатов анализа механизмов известной структуры.
2.2. Структурный анализ механизмов.
2.2.1. Задачи структурного анализа:
а) определение структуры - состава механизма;
б) классификация подвижных соединений звеньев - кинематических пар;
в) определение степени подвижности механизма.
Причины, вызывающие движение звеньев, не рассматриваются.
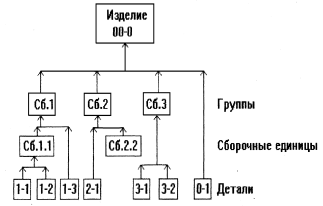
2.2.2. Структура механизма (М). М состоит из отдельных частейзвеньев, соединенных друг с другом подвижно с помощью кинематических пар. Все неподвижные детали М считают одним звеном - стойкой. Среди подвижных звеньев различают ведущие - положения или перемещения их в каждый момент времени задают с помощью обобщенных координат, ведомые, положения и перемещения которых однозначно зависят от положений или перемещений ведуших.
Кинематическая пара (КП) - соединение двух звеньев, обеспечивающее их определенное относительное перемещение. Звенья, объединенные КП в связанную систему, образуют кинематическую цепь.
Механизм - это замкнутая кинематическая цепь, обладающая определенностью перемещений звеньев, т.е. при задании перемещения ведущего звена (или звеньев) все остальные - ведомые - получают вполне определенные перемещения.
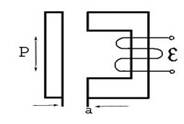
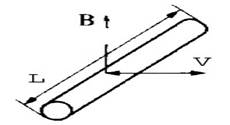
2.2.3. Кинематическая классификация КП. По характеру относительных перемещений звеньев все пары делят на 5 классов; класс пары определяется числом условий связи, наложенных на относительное перемещение звеньев: s = 6 - w, где 6 - число независимых перемещений свободного звена, w - число относительных независимых перемещений звеньев в паре. Примеры КП различных классов показаны на рис. 2.1, а их условные изображения на схемах - на рис. 2.2. Высшие КП (с точечным или линейным контактом звеньев) изображены на рис. 2.3. В винтовой паре 5-го класса линейное перемещение вдоль оси винта и вращательное вокруг нее связаны и образуют одно перемещение по винтовой линии.
2.2.4. Определение степени подвижности М по структурным формулам. Степень подвижености М - число независимых перемещений, которые нужно сообщить его ведущим звеньям, чтобы перемещения ведомых были однозначно определены.
Структурная формула М - уравнение, отражающее структуру и позволяющее определить степень подвижности:
w = 6k - sum[i* (p)i]1, 5 + qs, (2.1)
где 6k - сумма подвижностей k свободных звеньев, обьединяемых в M; sum[i* (p)i]1, 5 - сумма связей, образующихся в i парах класса (p)i (от 1 до 5 класса);
qs - дополнительные подвижности в M, обусловленные спецификой его структуры.
Подвижности qs появляются в M в том случае, когда перемещения части звеньев совершаются по одним и тем же поверхностям; но эти общие ограничения не мешают звеньям перемещаться относительно друг друга, т.е. становятся пассивными. Это равносильно появлению в M дополнительных подвижностей. В M на рис. 2.4 ограничения в КП A, В и С 5-го класса и в КП D 4-го класса - невозможность линейных перемещений вдоль оси Y и вращательных вокруг оси Z - обеспечивают qs =2.
2.2.5. Степень подвижности многоконтурного M . Сложные M часто содержат несколько связанных замкнутых кинематических цепей - контуров, в каждом из которых может быть различное число ограничений. Для таких M степень подвижности определяется по формуле
w = (6 - qs/c) *k - sum (i- qs/c) * (p)i, (2.2) где c - число контуров в M .
Это уравнение получается из (2.1) и условия k = sum[ (p)i] - c, справедливого для любого M . Например, для двухконтурного M на рис. 2.5 а, в контуре 1 q1 = 0, в контуре 2 q2 = 2 и qs = 2, следовательно, w = (6 - qs/c) *k - sum (i- qs/c) * (p)i = 5*7 - 4*7 - 3*1 - 2*1 = 2.
В M на рис. 2.5 б, который подобен рассмотренному, но имеет q1 = 2, q2 = 3, qs = 5 :
w = (6 - qs/c) *k - sum (i- qs/c) * (p)i == (6 - 5/2) *7 - (5 - 5/2) *9 = 2.
Степень подвижности этих M w = 2, т.е. у них должно быть два ведущих звена в каждом (например, звенья 1 и 7) .
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев