Формальная модель нейрона и нейросети
Краткое описание метода автономного адаптивного управления
Основные понятия и обозначения
Моделирование среды
Аппарат формирования и распознавания образов
Задача построения ФРО
Распознавание пространственно-временных образов
Система построения и исследования нейронных сетей СПИНС
Конструкторы сетей. Библиотеки шаблонов
Организация вычислений в сети
Реализация модели среды
Навигация
Реализация модели среды
Нейросетевая реализация системы
61847
знаков
3
таблицы
10
изображений
5.7. Реализация модели среды.
Представим среду с помощью КА Мура. Пусть КА имеет четыре состояния s1, s2, s3, s4 и представлен диаграммой Мура на рис. 5.7.1. Файл спецификации для модели среды содержит описание выходного сигнала в зависимости от состояния КА (первая часть в примере 5.7.1) и описание самого КА (вторая часть). Пятое дополнительное состояние КА initial является инициальным. Переходы указываются в виде (<исходное состояние>, <входное слово>) -> <конечное состояние>.
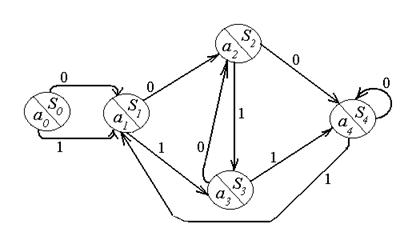
S0=initial, a0=0000, a1=0111, a2=1011, a3=1101, a4=1110
Рис. 5.7.1.
[Environment]
initial(output=1111)
s1(output=0111)
s2(output=1011)
s3(output=1101)
s4(output=1110)
[Finite State Automate]
set for word -1 synonym any
(initial,0)->s1
(initial,1)->s1
(s1,0)->s2
(s1,1)->s3
(s2,0)->s4
(s2,1)->s3
(s3,0)->s2
(s3,1)->s4
(s4,0)->s4
(s4,1)->s1
Пример 5.7.1. Спецификация модели среды.
Пример 5.8.1. Результат работы программы.
На диаграмме выведены выходные сигналы входных элементов (датчиков) I1, I2, I3, I4, нейронов N1, N2, N3, N4, БПР (DecisionMaker), БОС (Evaluator) и внутреннего элемента среды (Or), на который подаются сигналы от БПР и стохастического источника, а выход соединен с входом модели КА Мура. Множество возможных воздействий УС на среду состоит из двух элементов, обозначенных как 0 и 1. Из примеров 5.6.1 и 5.7.1 видно, что состоянием модели среды с наивысшей оценкой является s4. Из диаграммы 5.8.1 можно сделать вывод, что УС нашла закономерности управления, достаточные для удержания ОУ в состоянии s4 (t > 18), но в результате действия стохастического источника после некоторого времени пребывания в s4 ОУ перескакивает из этого состояния в s1, откуда УС снова переводит его в состояние s4.
Работу системы проиллюстрируем на рис. 5.8.1. В систему входят модель среды, состоящей из КА и Истока, и УС, состоящей из блоков ФРО, БОС, БЗ, БПР.
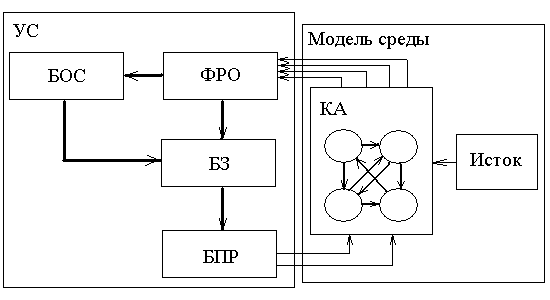
Рис. 5.8.1.
В конце примера выведена информация о состоянии БЗ, содержащей знания, эмпирически найденные УС к моменту окончания работы программы.
5.9. Перспективы развития СПИНС.
Кроме намеченных в разделе 5.1 направлений развития системы, а именно создание конструктора сетей с графическим интерфейсом, расширение языка спецификации сетей и др., необходима доработка и разработка нейросетевых реализаций БЗ и БПР, разработка методов создания реальных приложений по полученным с помощью СПИНС спецификациям сетей. Привлекательным является также создание трехмерного визуализатора БЗ. Визуализация БЗ основана на введении топологии в конечном пространстве образов базы знаний ![]() (определение 4.5) посредством отображения F и Y в R, таким образом, области в B отобразятся в области в
(определение 4.5) посредством отображения F и Y в R, таким образом, области в B отобразятся в области в ![]() .
.
Если образ ![]() ,
, ![]() сформирован, то он отображается точкой цвета, соответствующего сформировавшейся оценке образа
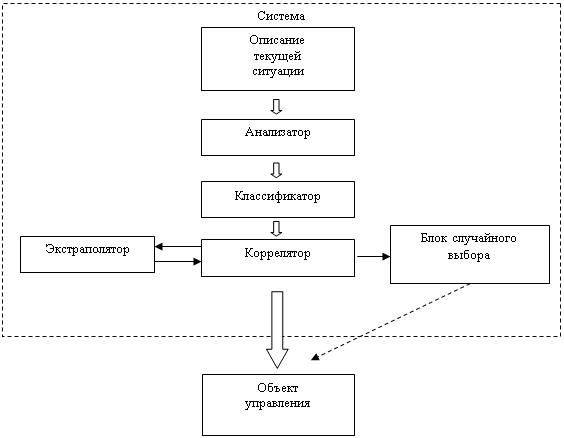
сформирован, то он отображается точкой цвета, соответствующего сформировавшейся оценке образа ![]() . При этом в пространстве обозначатся некоторые цветные области (рис. 5.9.1), иллюстрирующие закон управления.
. При этом в пространстве обозначатся некоторые цветные области (рис. 5.9.1), иллюстрирующие закон управления.

Рис. 5.9.1.
Заключение.
Основные результаты дипломной работы состоят в следующем:
Разработана концепция и реализовано ядро программной системы СПИНС для построения и исследования нейросетевой реализации прототипов управляющих систем, построенных по методу автономного адаптивного управления, созданного в отделе имитационных систем Института Системного Программирования РАН.
Доработаны аппарат формирования и распознавания образов, алгоритм заполнения базы знаний управляющей системы и алгоритм принятия решений.
Данные алгоритмы протестированы с помощью СПИНС на модельных примерах. Показано, что УС ААУ в рассмотренных примерах находит способ управления предъявленным объектом (средой) и осуществляет управление в соответствии с целевыми функциями.
Благодарности.
Автор выражает благодарность научному руководителю д. ф.-м. н. Александру Аркадьевичу Жданову за ценную поддержку и помощь в данной работе и член.-корр. РАН Виктору Петровичу Иванникову, под руководством которого были приобретены знания и опыт объектно-ориентированного программирования, в частности освоены объектные шаблоны (design patterns), использованные при разработке СПИНС.
Похожие работы
... , бистабильность восприятия. В дальнейшем планируется разработка программных моделей более сложных нейронных сетей и их комбинаций с целью получения наиболее эффективных алгоритмов для задачи распознавания образов. Литераура. 1.Горбань А.Н.,Россиев Д.А..Нейронные сети на персональном компьюере. 2. Минский М.Л.,Пайперт С..Персепроны.М.: Мир.1971 3. Розенблатт Ф.Принципы ...
... того привлекает огромный запас контекстных знаний, который системам распознавания образов пока недоступен. 7. Заключение Дан обзор различных нейросетевых методов распознавания изображений. Рассмотрены достоинства и недостатки этих методов при распознавании двумерных и трёхмерных объектов. Указаны проблемы при распознавании трёхмерных объектов. Выделены перспективные направления в распознавании ...
... в популяциях, которые являются существенными для развития. Точный ответ на вопрос: какие биологические процессы существенны для развития, и какие нет? - все еще открыт для исследователей. Реализация генетических алгоритмов В природе особи в популяции конкурируют друг с другом за различные ресурсы, такие, например, как пища или вода. Кроме того, члены популяции одного вида часто конкурируют ...
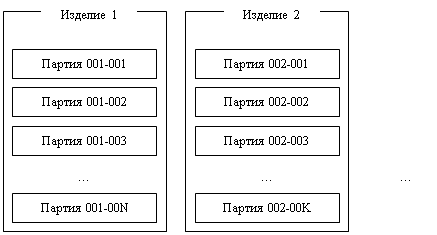
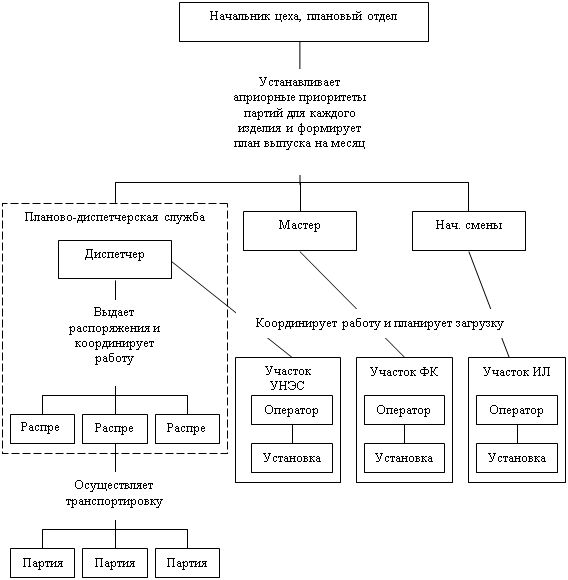
... на дипломное проектирование. Необходимо разработать программу регистрации процеса производства партий полупроводниковых пластин для использования в автоматизированной системе управления. Программа должна обеспечивать контроль и регистрацию производственного процесса производства партий пластин. Вести учет за прохождением партий полупроводниковых пластин по технологическому маршруту. Разработку ...
0 комментариев