Формальная модель нейрона и нейросети
Краткое описание метода автономного адаптивного управления
Основные понятия и обозначения
Моделирование среды
Аппарат формирования и распознавания образов
Задача построения ФРО
Распознавание пространственно-временных образов
Система построения и исследования нейронных сетей СПИНС
Конструкторы сетей. Библиотеки шаблонов
Организация вычислений в сети
Реализация модели среды
Навигация
Распознавание пространственно-временных образов
Нейросетевая реализация системы
61847
знаков
3
таблицы
10
изображений
3.4. Распознавание пространственно-временных образов.
Определение 3.4.1. Всякую совокупность значений реализации входного процесса в некоторые выбранные интервалы времени ![]() будем называть пространственно-временным образом (ПВО).
будем называть пространственно-временным образом (ПВО).
Отметим, что один нейрон способен распознавать (т.е. способен обучиться выделять конкретный ПВО среди всех остальных) только те ПВО, у которых единичное значение сигнала для каждой выбранной компоненты входного процесса встречается не более одного раза (пример изображен на верхнем графике рис. 3.4.1). Сеть нейронов можно построить так, что в ней будут формироваться любые заданные ПВО (нижний график рис. 3.4.1).
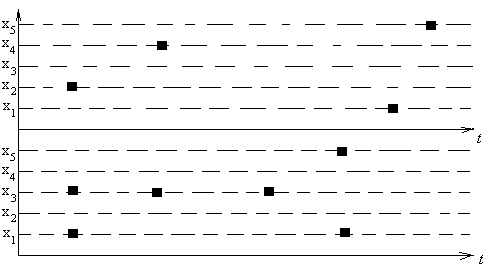
Рис 3.4.1.
4. База знаний.
Процесс накопления знаний БЗ в рамках методологии ААУ подробно рассмотрен в [Диссер], [Жданов4-8]. В данном разделе мы опишем лишь основные отличия от указанных источников.
Рассмотрим общий алгоритм формирования БЗ. Основная цель алгоритма состоит в накоплении статистической информации, помогающей установить связь между выбранными управляющей системой воздействиями на среду и реакцией среды на эти воздействия. Другая задача алгоритма состоит в приписывании оценок сформированным образам и их корректировки в соответствии с выходным сигналом блока оценки состояния.
Определение 4.1. Будем называть полным отсоединением ФРО от среды следующее условие: процессы ![]() и
и ![]() являются независимыми. Вообще говоря, в действующей системе, конечно же эти процессы зависимы, например, в простом случае без блока датчиков
являются независимыми. Вообще говоря, в действующей системе, конечно же эти процессы зависимы, например, в простом случае без блока датчиков ![]() , но для введения некоторых понятий требуется мысленно “отсоединить” входной процесс и процесс среды.
, но для введения некоторых понятий требуется мысленно “отсоединить” входной процесс и процесс среды.
Определение 4.2. Назовем временем реакции среды на воздействие ![]() число
число ![]() , где
, где ![]() случайные величины
случайные величины ![]() и
и ![]() являются зависимыми при полном отсоединении ФРО от среды. Закономерностью или реакцией среды будем считать зависимость
являются зависимыми при полном отсоединении ФРО от среды. Закономерностью или реакцией среды будем считать зависимость ![]() от
от ![]() .
.
Другими словами, время реакции среды это время, через которое проявляется, т.е. может быть распознана блоком ФРО, реакция на воздействие.
Пример 4.1. ![]() =
= ![]() . Очевидно, что здесь
. Очевидно, что здесь ![]() .
.
Определение 4.3. Назовем минимальной ![]() и максимальной
и максимальной ![]() инертностью среды минимальное и максимальное соответственно время реакции среды на воздействие
инертностью среды минимальное и максимальное соответственно время реакции среды на воздействие ![]() для всех
для всех ![]() . Интервал
. Интервал ![]() будем называть интервалом чувствительности среды.
будем называть интервалом чувствительности среды.
Заметим, что ![]() .
.
Введем совокупность образов
![]() . (4.1)
. (4.1)
Параметр n > 0 назовем запасом на инертность среды. Смысл ![]() состоит в том, что если
состоит в том, что если ![]() обучен, в текущий момент времени распознан образ
обучен, в текущий момент времени распознан образ ![]() и УС выберет воздействие
и УС выберет воздействие ![]() то с некоторой вероятностью через n шагов распознается образ
то с некоторой вероятностью через n шагов распознается образ ![]() . Аналогично введем образ
. Аналогично введем образ
![]() , (4.2)
, (4.2)
смысл которого совпадает со смыслом ![]() , с тем лишь различием, что
, с тем лишь различием, что ![]() не распознается, а вытеснится. Поскольку в конечном итоге способом управления УС является вызов определенных образов и вытеснение других, то совокупность обученных образов
не распознается, а вытеснится. Поскольку в конечном итоге способом управления УС является вызов определенных образов и вытеснение других, то совокупность обученных образов ![]() является материалом, способствующим достижению цели управления, то есть вызову или вытеснению определенных образов посредством выбора воздействия
является материалом, способствующим достижению цели управления, то есть вызову или вытеснению определенных образов посредством выбора воздействия ![]() из множества возможных воздействий Y на каждом шаге t. Как используется этот материал будет изложено в разделе “Блок принятия решений”.
из множества возможных воздействий Y на каждом шаге t. Как используется этот материал будет изложено в разделе “Блок принятия решений”.
Запас на инертность введен из следующих соображений. Совершенно очевидно, что бесполезно пытаться уловить закономерность вида “был распознан образ ![]() , применили
, применили ![]() и через m шагов получили
и через m шагов получили ![]() ”, где
”, где ![]() , так как среда будет просто не успевать отреагировать. Таким образом, УС может уловить закономерности со временем реакции среды не большим чем n. Аналогично, нет смысла выбирать n слишком большим, т.е. гораздо большим, чем
, так как среда будет просто не успевать отреагировать. Таким образом, УС может уловить закономерности со временем реакции среды не большим чем n. Аналогично, нет смысла выбирать n слишком большим, т.е. гораздо большим, чем ![]() . С другой стороны, используя синаптические задержки входных сигналов в нейроне, мы можем отловить любую закономерность со временем реакции меньшим либо равным запасу на инертность. Действительно, мы можем построить ФРО так, чтобы образы
. С другой стороны, используя синаптические задержки входных сигналов в нейроне, мы можем отловить любую закономерность со временем реакции меньшим либо равным запасу на инертность. Действительно, мы можем построить ФРО так, чтобы образы ![]() и
и ![]() формировались с нужными задержками
формировались с нужными задержками ![]() , где m – время реакции среды. Заметим, что a priori нам неизвестно время реакции среды m, поэтому имеет смысл лишь выбрать параметр n для всех образов одинаковым и “наверняка” большим чем
, где m – время реакции среды. Заметим, что a priori нам неизвестно время реакции среды m, поэтому имеет смысл лишь выбрать параметр n для всех образов одинаковым и “наверняка” большим чем ![]() (для этого необходимо воспользоваться априорной информацией о среде).
(для этого необходимо воспользоваться априорной информацией о среде).
Теперь сопоставим каждому образу из ФРО некоторое число или оценку. Пусть ![]() – выход блока оценки состояния, а
– выход блока оценки состояния, а ![]() – оценка образа
– оценка образа ![]() , получающаяся по следующему алгоритму:
, получающаяся по следующему алгоритму:
![]() ,
, ![]() ,
,
где ![]() – некоторая “усредняющая” функция,
– некоторая “усредняющая” функция, ![]() - множество моментов времени, в которые образ
- множество моментов времени, в которые образ ![]() был распознан. В качестве
был распознан. В качестве ![]() обычно берется просто среднее арифметическое
обычно берется просто среднее арифметическое
![]() .
.
Теперь можно определить, что такое база знаний.
Определение 4.4. Назовем базой знаний совокупность сформированных образов ![]() и совокупность оценок
и совокупность оценок ![]() для всех образов ФРО.
для всех образов ФРО.
Определение 4.5. Обозначим объединение множеств всех образов (4.1) и (4.2) через ![]() , где F – множество образов ФРО, Y – множество возможных воздействий. Назовем B пространством образов БЗ.
, где F – множество образов ФРО, Y – множество возможных воздействий. Назовем B пространством образов БЗ.
Похожие работы
... , бистабильность восприятия. В дальнейшем планируется разработка программных моделей более сложных нейронных сетей и их комбинаций с целью получения наиболее эффективных алгоритмов для задачи распознавания образов. Литераура. 1.Горбань А.Н.,Россиев Д.А..Нейронные сети на персональном компьюере. 2. Минский М.Л.,Пайперт С..Персепроны.М.: Мир.1971 3. Розенблатт Ф.Принципы ...
... того привлекает огромный запас контекстных знаний, который системам распознавания образов пока недоступен. 7. Заключение Дан обзор различных нейросетевых методов распознавания изображений. Рассмотрены достоинства и недостатки этих методов при распознавании двумерных и трёхмерных объектов. Указаны проблемы при распознавании трёхмерных объектов. Выделены перспективные направления в распознавании ...
... в популяциях, которые являются существенными для развития. Точный ответ на вопрос: какие биологические процессы существенны для развития, и какие нет? - все еще открыт для исследователей. Реализация генетических алгоритмов В природе особи в популяции конкурируют друг с другом за различные ресурсы, такие, например, как пища или вода. Кроме того, члены популяции одного вида часто конкурируют ...
... на дипломное проектирование. Необходимо разработать программу регистрации процеса производства партий полупроводниковых пластин для использования в автоматизированной системе управления. Программа должна обеспечивать контроль и регистрацию производственного процесса производства партий пластин. Вести учет за прохождением партий полупроводниковых пластин по технологическому маршруту. Разработку ...
0 комментариев