Навигация
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЗАМКНУТЫХ СИСТЕМАХ
30431
знак
14
таблиц
17
изображений
2. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЗАМКНУТЫХ СИСТЕМАХ
Запишем выражение передатичной функции для системы в замкнутом состоянии:
 ,
(2.1)
,
(2.1)
где  .
.
Тогда выражение (2.1) будут иметь вид:

![]() ,
(2.2)
,
(2.2)
Найдем передаточную функию для замкнутой системы с П – регулятором, т.е. Wp(p) = Кp . Кp – оптимальное значение, найденное в первом разделе , т. е. Кp = 1.01.
Предаточная функция замкнутой системы с П – регулятором имеет следующие вид:
 , (2.3)
, (2.3)
Переходная функция замкнутой системы:
 , (2.4)
, (2.4)
Найдем полюса фунгкции (2.4).
Для этого необходимо найти корни следующего уравнения:
p(![]() ) = 0.
) = 0.
Они равны:
p1 = 0;
p2 = - 0.435;
p3 = - 0.181 – j0.34;
p4 = - 0.181 + j0.34.
Переходная функция для замкнутой системы с П – регулятором будет иметь следующий вид:
h(t) = 0.757-0.052e-0.424t * cos(0.254t) - 0.3857e-0.181t * sin(0.354t).
Построим переходный процесс функции, изобразим график этого процесса на рисунке 2.1.
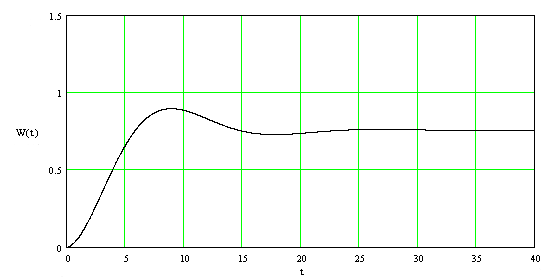
Рисунок 2.1 – Переходный процесс в замкнутой системе с П – регулятором.
Запишем передаточную функцию для замкнутой системы с ПИ – регулятором, т.е.:
![]() .
.
В качестве Кр и Тu берем значения, которые были получены в первом разделе, т.е. берем Кр = 0.777 и Тu = 16.928. Тогда выражение передаточной функции имеет следующие далее вид:
![]() , (2.5)
, (2.5)
Запишем предаточную функция замкнутой системы с ПИ – регулятором, для этого воспользуемся формулой (2.1):
 , (2.6)
, (2.6)
Переходная функция замкнутой системы имеет следующий вид:
 , (2.7)
, (2.7)
Найдем полюса фунгкции (2.7).
Для этого необходимо найти корни следующего уравнения:
p(![]() ) = 0.
) = 0.
Они равны:
p1 = - 0.421;
p2 = - 0.075;
p3 = - 0.149 – j0.29;
p4 = - 0.149 + j0.29;
p5 = 0.
Переходная функция для замкнутой системы с ПИ – регулятором будет иметь следующий вид:
h(t) = 1- 0.0609e-0.421t – 0.757e-0.148t *cos(0.29t)-0.4870.148t *sin(0.29t)-0.181e-0.075t
Построим переходный процесс функции, изобразим график этого процесса на рисунке 2.2.
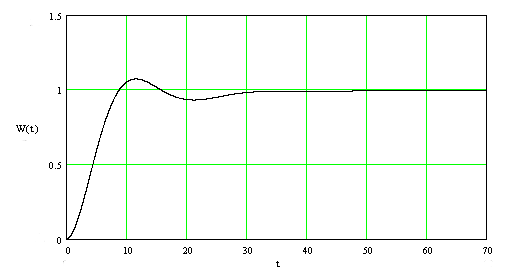
Рисунок 2.2 – Переходный процесс в замкнутой системе с ПИ – регулятором.
Запишем передаточную функцию для замкнутой системы с ПИД – регулятором, т.е.:
![]() .
.
В качестве Кр , Тu и Тg берем значения, которые были получены в первом разделе, т.е. берем Кр = 1.9456 , Тu = 7.506, и Тg = 0.976. Тогда выражение передаточной функции имеет следующий далее вид:
![]() , (2.8)
, (2.8)
Запишем предаточную функция замкнутой системы с ПИД – регулятором, для этого воспользуемся формулой (2.1):
 , (2.9)
, (2.9)
Переходная функция замкнутой системы имеет следующий вид:
 , (2.10)
, (2.10)
Найдем полюса фунгкции (2.10).
Для этого необходимо найти корни следующего уравнения:
p(![]() ) = 0.
) = 0.
Они равны:
p1 = 0;
p2 = -0.405 – j0.116;
p3 = -0.405 + j0.116;
p4 = -0.039 – j0.192;
p5 = -0.039 + j0.192.
Переходная функция для замкнутой системы с ПИД – регулятором будет иметь следующий вид:
h(t) = 1 – 0.2927e-0.404t*cos(0.1157t)- 0.032e-0.404t*sin(0.1157t)- 0.6934e-0.038t*cos(0.1918t)- 0.2055e-0.0388t*sin(0.1918t).
Построим переходный процесс функции, изобразим график этого процесса на рисунке 2.3.
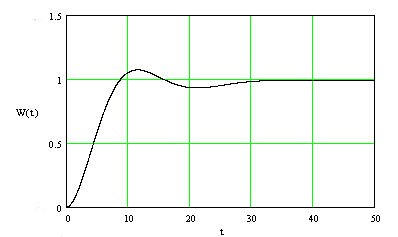
Рисунок 2.3 – Переходный процесс в замкнутой системе с ПИД – регулятором.
Похожие работы
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
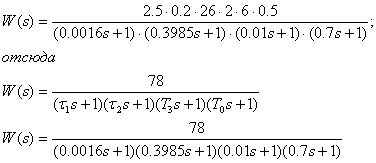
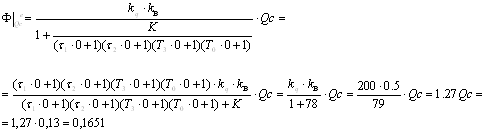
... вариант To ko T1 T2 kc kв kQ kП ky T3 k3 ν σ c c c c % % 4-9 0.7 6 0.4 0.025 2.5 0.5 200 0.13 0.2 26 0.01 2 2 5 Введение Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
... правило, выполняется в виде одной «большой» ИМС. Схемотехника является частью микроэлектроники, предметом которой являются методы построения устройств различного назначения на микросхемах широкого применения. Предметом же цифровой схемотехники являются методы построения (проектирования) устройств только на цифровых ИМС. Особенностью цифровой схемотехники является широкое применение для описания ...
0 комментариев