Навигация
Нормирование кривых разгона
17319
знаков
9
таблиц
11
изображений
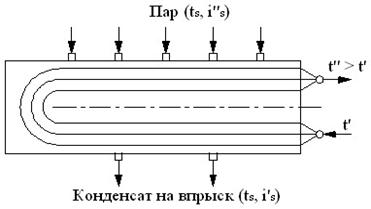
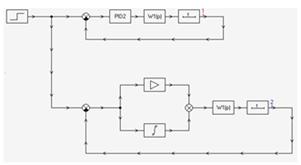
4. Нормирование кривых разгона.
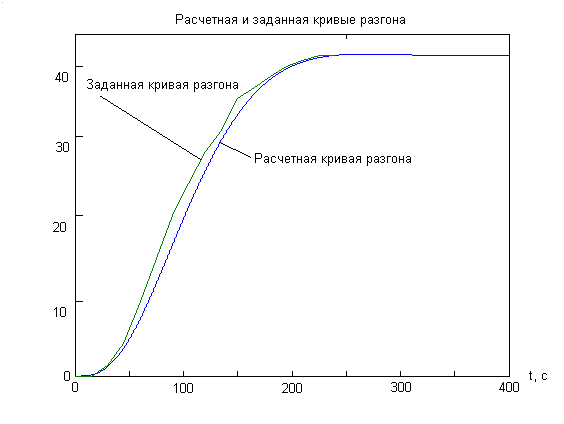
С помощью программы ASR в пункте нормировать последовательно производим нормирование сглаженных кривых и упорядочиваем время начиная с 0,0000, с шагом 0,5 для того чтобы привести полученную динамическую характеристику к единичному виду.
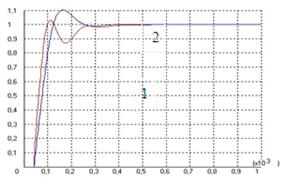
4.1 Нормированная кривая разгона для внешнего контура
табл.4.1
| 1 | 0,0000 | 0,0000 | 22 | 10,5000 | 0,8201 |
| 2 | 0,5000 | 0,0175 | 23 | 11,0000 | 0,8401 |
| 3 | 1,0000 | 0,0508 | 24 | 11,5000 | 0,8585 |
| 4 | 1,5000 | 0,0924 | 25 | 12,0000 | 0,8718 |
| 5 | 2,0000 | 0,1407 | 26 | 12,5000 | 0,8868 |
| 6 | 2,5000 | 0,1807 | 27 | 13,0000 | 0,9001 |
| 7 | 3,0000 | 0,2356 | 28 | 13,5000 | 0,9117 |
| 8 | 3,5000 | 0,2923 | 29 | 14,0000 | 0,9184 |
| 9 | 4,0000 | 0,3489 | 30 | 14,5000 | 0,9284 |
| 10 | 4,5000 | 0,3905 | 31 | 15,0000 | 0,9367 |
| 11 | 5,0000 | 0,4421 | 32 | 15,5000 | 0,9450 |
| 12 | 5,5000 | 0,4921 | 33 | 16,0000 | 0,9500 |
| 13 | 6,0000 | 0,5404 | 34 | 16,5000 | 0,9567 |
| 14 | 6,5000 | 0,5754 | 35 | 17,0000 | 0,9634 |
| 15 | 7,0000 | 0,6170 | 36 | 18,5000 | 0,9700 |
| 16 | 7,5000 | 0,6553 | 37 | 18,0000 | 0,9750 |
| 17 | 8,0000 | 0,6903 | 38 | 18,5000 | 0,9800 |
| 18 | 8,5000 | 0,7152 | 39 | 19,0000 | 0,9850 |
| 19 | 9,0000 | 0,7452 | 40 | 19,5000 | 0,9900 |
| 20 | 9,5000 | 0,7735 | 41 | 20,0000 | 0,9950 |
| 21 | 10,0000 | 0,7985 | 42 | 20,5000 | 1,0000 |
4.2 Нормированная кривая разгона для внутреннего контура
табл.4.2
| 1 | 0,0000 | 0,0000 | 30 | 14,5000 | 0,7973 |
| 2 | 0,5000 | 0,0150 | 31 | 15,0000 | 0,8090 |
| 3 | 1,0000 | 0,0299 | 32 | 15,5000 | 0,8239 |
| 4 | 1,5000 | 0,0515 | 33 | 16,0000 | 0,8372 |
| 5 | 2,0000 | 0,0814 | 34 | 16,5000 | 0,8505 |
| 6 | 2,5000 | 0,1146 | 35 | 17,0000 | 0,8588 |
| 7 | 3,0000 | 0,1478 | 36 | 17,5000 | 0,8688 |
| 8 | 3,5000 | 0,1744 | 37 | 18,0000 | 0,8787 |
| 9 | 4,0000 | 0,2126 | 38 | 18,5000 | 0,8887 |
| 10 | 4,5000 | 0,2508 | 39 | 19,0000 | 0,8970 |
| 11 | 5,0000 | 0,2890 | 40 | 19,5000 | 0,9053 |
| 12 | 5,5000 | 0,3173 | 41 | 20,0000 | 0,9136 |
| 13 | 6,0000 | 0,3555 | 42 | 20,5000 | 0,9203 |
| 14 | 6,5000 | 0,3937 | 43 | 21,0000 | 0,9252 |
| 15 | 7,0000 | 0,4302 | 44 | 21,5000 | 0,9302 |
| 16 | 7,5000 | 0,4568 | 45 | 22,0000 | 0,9352 |
| 17 | 8,0000 | 0,4900 | 46 | 22,5000 | 0,9402 |
| 18 | 8,5000 | 0,5233 | 47 | 23,0000 | 0,9452 |
| 19 | 9,0000 | 0,5548 | 48 | 23,5000 | 0,9502 |
| 20 | 9,5000 | 0,5781 | 49 | 24,0000 | 0,9551 |
| 21 | 10,0000 | 0,6063 | 50 | 24,5000 | 0,9601 |
| 22 | 10,5000 | 0,6329 | 51 | 25,0000 | 0,9651 |
| 23 | 11,0000 | 0,6578 | 52 | 25,5000 | 0,9701 |
| 24 | 11,5000 | 0,6761 | 53 | 26,0000 | 0,9751 |
| 25 | 12,0000 | 0,6993 | 54 | 26,5000 | 0,9801 |
| 26 | 12,5000 | 0,7209 | 55 | 27,0000 | 0,9850 |
| 27 | 13,0000 | 0,7409 | 56 | 27,5000 | 0,9900 |
| 28 | 13,5000 | 0,7608 | 57 | 28,0000 | 0,9950 |
| 29 | 14,0000 | 0,7791 | 58 | 28,5000 | 1,0000 |
Похожие работы
... : Сравнивая экспериментальные и фактические кривые разгона видим, что они отличаются очень сильно. Фактическая кривая разгона приходит к 1 на много быстрее, чем экспериментальная. Расчет АФХ передаточных функций. 1. Объект второго порядка по возмущению: а) экспериментальная: 1 1,0000 0,0000 34 -0,3751 -0,5372 68 -0,1944 -0,0241 2 1,0211 -0, ...
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
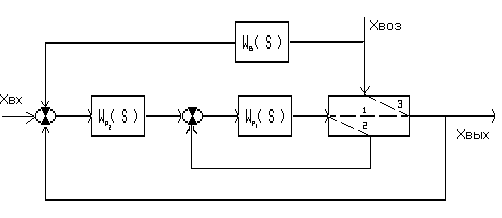


... компенсатора 1.W(s)=1/(9*s2+6*s+1) 2.K=Kп=0.49 3.K/S=Kп/Tи=0.0916 4.W(s)=1/(13.824*s3*17.28*s2+7.2*s+1) 5.K=1,T=6 6.K=-1 7.K=-1 Переходной процесс Перерегулирование – 87% Время затухания – 65с Степень затухания –0.95 9.2 Комбинированная система управления с подачей дополнительного воздействия на вход регулятора Определим передаточную функцию фильтра согласно формуле :Wф(s)=Wов(s)/( ...
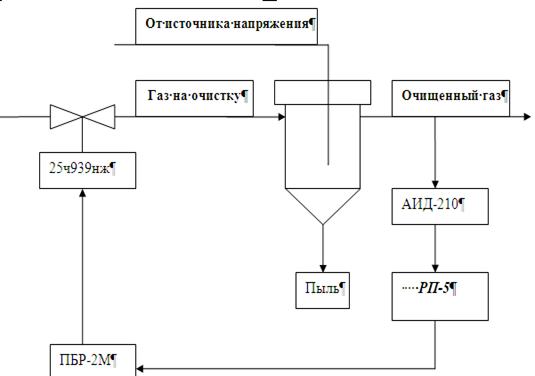
... параметры. Показателем эффективности данного процесса является степень очистки газа. Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора. Выбраны приборы для основного контура регулирования. 1. Специальная часть ...
0 комментариев