Навигация
Расчет регулятора исследуемого объекта
40415
знаков
5
таблиц
66
изображений
 5. Расчет регулятора исследуемого объекта
5. Расчет регулятора исследуемого объекта Произведем расчет регулятора для системы, у которой производительность питателя на входе и дробилки на выходе. В качестве рассматриваемого объекта – щековая дробилка С-887, для которой
![]() т/ч,
т/ч, ![]() =2.11 т, Т1=60 с, T2 = 30 c, τ1 = 2 c, τ2 = 1 c.
=2.11 т, Т1=60 с, T2 = 30 c, τ1 = 2 c, τ2 = 1 c.
Передаточная функция объекта равна
После разложения экспоненты в ряд Паде получим: ![]() =
=![]()
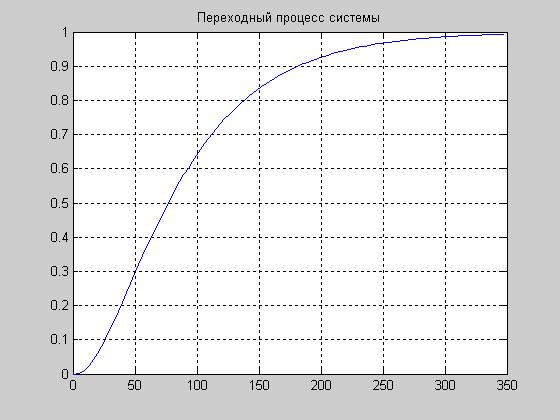
Рис. 5.1. Переходный процесс системы.
 5.1 Расчет регулятора методом РЧХ
5.1 Расчет регулятора методом РЧХ
Согласно этому методу, расчетные формулы для настроек регулятора замкнутой системы, представленной на рис. 5.2, получают из условия, аналогичного критерию Найквиста.
 |
Рис. 5.2. Требуемая структура системы, к которой применим метод РЧХ
Если разомкнутая система имеет степень колебательности не ниже заданной, то замкнутая систем будет обладать заданной степенью колебательности в том случае, когда расширенная КЧХ разомкнутой системы ![]() проходит через точку с координатами
проходит через точку с координатами ![]() , т.е.
, т.е.
![]() ,
,
где ![]() (1)
(1)
Уравнение (1) равносильно двум уравнениям, записанным относительно расширенных АЧХ и ФЧХ объекта и регулятора, а именно:
 (2)
(2)
Для заданных частотных характеристик объекта и выбранного закона регулирования при решении системы уравнений (2) находят вектор настроек регулятора S, обеспечивающих заданную степень колебательности на каждой частоте.
Самыми распространенными регуляторами являются П, ПИ и ПИД поэтому рассчитаем коэффициенты для данных регуляторов и выберем из них по переходному процессу наиболее оптимальный.
Формулы для расчета коэффициентов регуляторов получают из системы:
П:
R(p)=s1,
![]()
![]() ,
,
![]() ;
;
ωр – находят при ![]() =-180,
=-180,
Для данной системы П – регулятор неприменим, т. к. ФЧХ никогда не будет равняться -180.
ПИ:
R(p)=s1+![]()
![]()
ωр = 0.8 ωп ,
Используя программу MatLab для решения системы получаем следующие коэффициенты:
S1 = 0.1243,
S0 =0.0209.
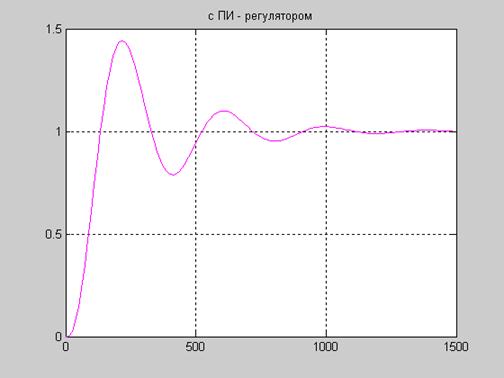
Рис. 5.2. Переходный процесс системы с ПИ – регулятором.
ПИД:
R(p)=s1+![]()
![]()
S2 = 1,
S1 = 1.6453,
S0 =0.0211.
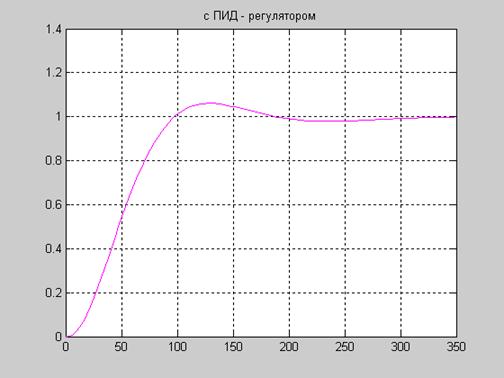
Рис. 5.3. Переходный процесс системы с ПИД – регулятором.
Из переходных процессов видно, что наиболее оптимальным является ПИД – регулятор, т. к. у него меньше перерегулирование и меньше время переходного процесса.
Похожие работы
... повреждений и износа составных частей оборудования, а также трудоемкостью ремонтных работ, системой ТОиР предусматривается проведение текущего, капитального и остановочного ремонтов. 1.4.1 Требования, предъявляемые к техническому обслуживанию и ремонту стержневой мельницы МСЦ 3,2 – 4,5 В течении первых десяти дней работы мельницы после ремонта следует останавливать не реже одного раза в смену ...
0 комментариев