Навигация
Реализация САР в GOOD HELP
40415
знаков
5
таблиц
66
изображений
 7. Реализация САР в GOOD HELP
7. Реализация САР в GOOD HELP Устройство управления системой реализуем на базе контроллера ROBO 3140 с помощью системы графического программирования контроллеров Good Help, которая представляет собой поддержку языка функциональных блоковых диаграмм – FBD (Function Block Diagrams).
Графический язык диаграмм функциональных блоков (далее FBD) позволяет технологу строить сложные схемы на основе существующих функций библиотеки системы Good Help, связанных в диаграмму.
Диаграмма FBD описывает функцию, определяющую взаимодействие между входами и выходами блоков, имеющихся в библиотеке.
Элементарный блок выполняет одну функцию взаимодействия между своими входами и выходами. Схема разрабатывается путем размещения функциональных блоков на различных вкладках поля редактирования, которые позволяют создавать логическое разбиение контуров редактирования по группам.
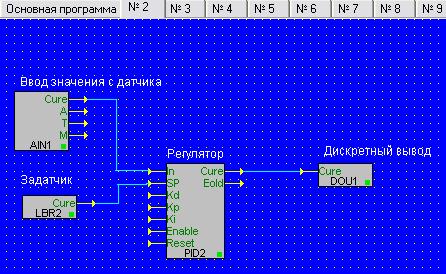
Для реализации полученного оптимального закона регулирования необходимо в редакторе схем (edchart) с помощью стандартных блоков набрать соответствующую программу.
 Программа регулирования производительности щековой дробилки
Программа регулирования производительности щековой дробилки
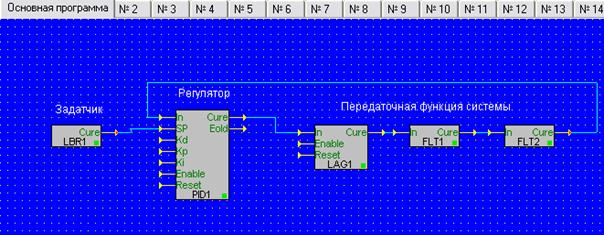
Для проверки системы отображения информации на пульте оператора можно создать тестовую схему, описывающую математическую модель объекта управления.
Программа регулирования производительности щековой дробилки в тестовом режиме.
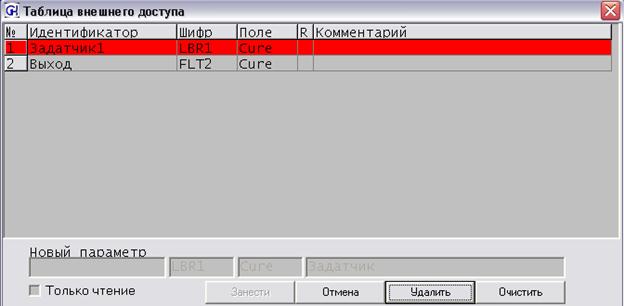
Регулируемые параметры, а также параметры, несущие важную информацию о ходе технологического процесса, необходимо занести в таблицу внешнего доступа, чтобы они были доступны оператору.
В данном случае таблица внешнего доступа имеет вид:
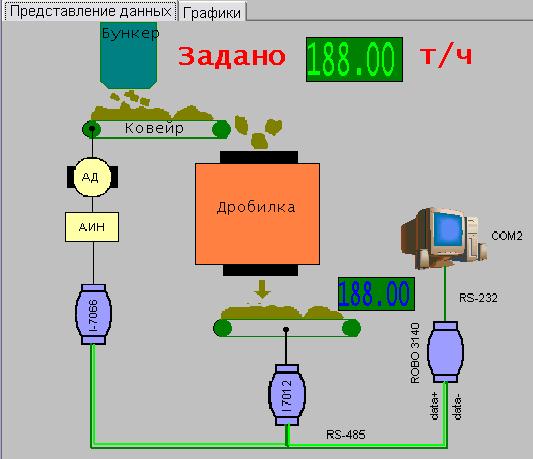
Для удобного контроля и управления технологическим процессом воспользуемся редактором отображения информации (wstation). Он предназначен для представления данных, полученных от технологических контроллеров, на графических мнемосхемах.
В окне редактирования на поверхности статической мнемосхемы (иначе ее можно назвать подложка или фон) производится расстановка форм отображения информации и привязка к этим формам параметров, получаемых от контроллеров.
В данном случае нам необходимо обеспечить отображение производительности дробилки, а также заданную производительность дробилки с возможностью ее изменения.
Окно регулирования загрузки мельницы (рис. 7.1) содержит в качестве подложки функциональную схему процесса, а также две формы типа динамический текст для отображения производительности. Эти формы предназначены для отображения и ввода информации. Это свойство можно использовать для обеспечения возможности оператору задавать требуемую производительность мельницы.
|
Окно переходных процессов (рис. 7.2) носит вспомогательный характер и отражает динамику процесса регулирования производительности дробилки.
|

 Заключение
Заключение
В данном курсовом проекте была произведена автоматизация щековой дробилки, для которой производительность на выходе зависит от производительности питателя. Для того чтобы система обладала быстродействием и не была при этом расходящаяся, был выбран и рассчитан регулятор. Наилучшими свойствами указанными выше при расчете регулятора обладает ПИД-регулятор.
Данную систему реализовали в GOOD HELP для реального объекта с использование модулей I -7000, ROBO-3140 и стандартных компонент. А также создали тестовый вариант программы для наглядной демонстрации.
 Список литературы
Список литературы
1. Зеличенок Г. Г. Автоматизация технологических процессов на предприятии строительной индустрии – М.: “ Машиностроение ”1974г.
2. Проектирование цементных заводов. Под редакцией Зозулина П.В., Никифорова Ю. В. – М.: “Машиностроение”, 1995г.
3. Банит Ф. Г., Несвижский О.А. Механическое оборудование цементных заводов – М.: “ Машиностроение ”,1975г.
4. www.icp2u.ru
5. www.metran.ru
6. http://upk.ural.ru/index/ru/products/17
Похожие работы
... повреждений и износа составных частей оборудования, а также трудоемкостью ремонтных работ, системой ТОиР предусматривается проведение текущего, капитального и остановочного ремонтов. 1.4.1 Требования, предъявляемые к техническому обслуживанию и ремонту стержневой мельницы МСЦ 3,2 – 4,5 В течении первых десяти дней работы мельницы после ремонта следует останавливать не реже одного раза в смену ...
0 комментариев