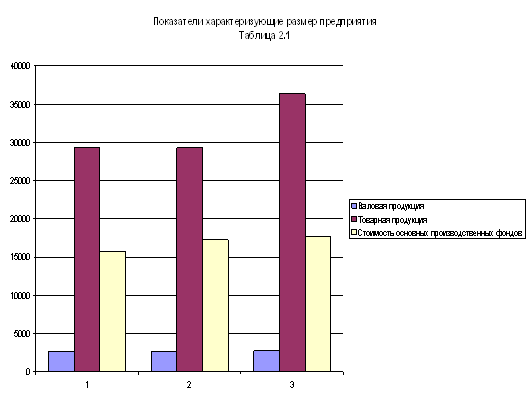
Характеристика
хозяйства
Выводы и
предложения
Выбор
и обоснование
режима работы
фермы
Определение
потребного
количества
основных и
Составление
схем технологических
линий и
Линия
уборки навоза.
Навоз из животноводческих
помещений
удаляются
навозоуборочным
транспортёром
ТСН –160 А. Стойла
очищаются
механически
Выбор оптимальных
вариантов
технологических
линий с
Разработка
генерального
плана фермы
Устройство
для уборки
навоза. Австрийский
патент №3339652
Навигация
Устройство для уборки навоза. Австрийский патент №3339652
Разработка поточных технологических линий обслуживания животных для ферм крупного рогатого скота
66021
знак
20
таблиц
3
изображения
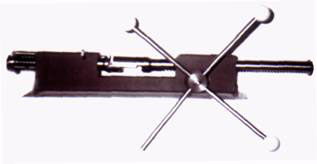
3.2.4. Устройство для уборки навоза. Австрийский патент №3339652.
Рис. 3.2.Устройство для уборки навоза.
направляющий элемент;
выступы;
штанга;
скребок;
стойка;
болт;
стопорная пластина.
3.2.5. Назаров С.И., Прокопенко К.И. Механизация очистки стоил
[27. с. 33…34]. Разработан мобильный механический очиститель стойл
(рис 3.3.).Привод очистителя: электродвигатель 1,5 кВт, редуктор РЧУ –63А. Питание через гибкий кабель, подвешенный над конвейером. При работе конвейера очиститель движется вдоль стойл. Скребки 5 счищают навоз с поверхности стойл в навозный канал.
Рис.3.3.Схема очистителя стойл.
рама;
привод;
самоустанавливающиеся колеса;
цепь транспортера;
скребок;
ведомый вал;
ведущий вал;
поверхность стойла.
3.2.6. Журавлев Б.И., Бородулин Е.Н., Макаров Э.Р., Соловьев Р.В. Новая технология уборки навоза на фермах крупного рогатого скота [28. С. 22…24]. Предлагается укороченное стойло (рис.3.4.), длина которого на 50…100 мм больше длины косой животного и расположенное на 100…150 мм выше решетки навозного канала. Более низкие уступы ведут к загрязнению стойла, более высокие опасны для животных. Боковые ограничители устанавливают на высоте 1000 мм и длине 1000…1200 мм. Для удобства работы доярок через один длинный устанавливают один короткий ограничитель длиной 600…800мм. Большое значение имеет наклон пола стойл. Стойла имеют ширину 1200мм, уклон пола1%. На пол коротких стойл попадает 22%кала и 17% мочи, а длинных соответственно 94 и 93%.
Затраты труда на уборку понижаются в 2-3 раза. Если же убирать навоз один раз в смену, то можно вдвое уменьшить число скотников.
Рис.3.4. Укороченное стойло.
3.3.Выбор и обоснование конструкции для уборки стойл
Цель конструирования – повышение качеств уборки навоза, снижение затрат ручного труда при обслуживании животных. Конструкция устройства
(рис 3.5.)содержит промышленный транспортер ТСН – 160А 1 и дополнительные скребки 2, удаляющие навоз с задней поверхности стойла 9. Дополнительный скребок 2 посажен на вал 4, который вращается в чугунной втулке 6. Втулка 6 посажена в стакан 5, который приваривается ручной электродуговой сваркой к плите 3. Со стороны стойла к плите 3 приварена проушина 8, в которую входит штырь 11, фиксирующий плиту.
Рис.3.5.Схема конструкции для очистки стойл.
транспортер скребковый навозоуборочный ТСН –160А;
дополнительный скребок;
плита;
вал;
стакан;
втулка;
звездочка;
проушина;
стойло;
анкерные болты крепления конструкции;
штырь фиксирующий плиту.
При движении транспортера 1 звездочка 7 приводится в движение и вращает вал 4 с дополнительным скребком 2. Плита 3 крепится двумя анкерными болтами к торцевой стенке навозного канала. В процессе уборки навоза, за счет того, что рабочая поверхность скребка 2 выполнена по кубической параболе, захваченный навоз будет сходит со скребка с наименьшим сопротивлением.
3.4. Технологический расчет устройства для очистки стойл
Исходя из известной подачи транспортера ТСН –160А определяется призма волочения по формуле:
h=Q/в*σ*ρ*К, (3.1.)
где Q – подача транспортера, Q =1,25 кг/с [26.с.4.];
в – ширина навозного канала, в =0,32 м [26.с.84]
σ – скорость цепи транспортера, σ=0,18 м/с [26.с.5.]
ρ - плотность навоза, ρ=700 кг/м3 [30. С.40]
К - коэффициент подачи, К=К1*К2*К3*К4*К5, (3.2.)где К1 – коэффициент заполнения навозного канала, К1=0,5;
К2 – коэффициент, учитывающий уплотнение навоза, при его
перемещении скребком, К2=1,13;
К3 – скоростной коэффициент, К3=0,9;
К4 – коэффициент, учитывающий объем канавки занятой цепью, К4 =1;
К5 – коэффициент, учитывающий уклон подъема наклонного
трансформатора, К5=0,8 [ 5.с.165.]
К=0,5*1,13*0,9*1*0,8=1,32h=1,25/0,32*700*0,18*1,32=0,024м,
Тяговое сопротивление Р движению транспортёра определяется по формуле:
Р = Nэв*102т /Кσ, (3.3.)
где Nэв – мощность электродвигателя, Nэв = 4кВт [26. С. 5.]
т – коэффициент полезного действия передачи,
т = 0,8 [4. c. 401.]
К – коэффициент учитывающий сопротивление от натяжения цепи,
К=1,1 [4. с. 401]
Р = 4*102*0,8 /1,1*1,18=1648 Н,
Для обеспечения нормальных условий работы скребка необходимо чтобы
Tgλ ≤ tg2, (3.4)где - угол отклонения от перпендикуляра цепи;
2 – угол трения навоза о скребок.
Необходимое минимальное предварительное натяжение цепи Рmin определяется по формуле:
Рmin =Po вс/[tц (tgλmax – f1tg2λmax)]-Po/[2(1-f1tgλmax)], (3.5.)
где Ро – сопротивление движению скребка при расположении его по нормали
к стене канавки, Н;
Ро =Р/(1-f1 *tgλ), (3.6.)
Ро = 1648/(1-0,7)=1648 Н
вс – расстояние точки приложения силы Р от цепи, вс =0,5 в+с
в – длина скребка, в=0,285м;
с – расстояние от середины скребка до точки приложения силы Р, с=0,015 м;
tц –шаг цепи, tц = 0,08 м [26. С.26]
λmax – максимально допустимый угол наклона скребка, λmax=150 [4. с. 401]
f1 – коэффициент трения навоза о боковую стенку канала, f1= 0,7 [4. С. 400.]
Hmin =1648*0,157/[0,08 (0,26795 – 0,7*0,072)]-1648/[2(1-0,7*0,26795)]=1150 Н
3.5. Кинематический и энергетический расчет устройства
.Кинематические схемы навозоуборочного транспортера с дополнительным скребком представлена на рисунке 3.6.
Рис 3.6. Кинематическая схема навозоуборочного транспортера ТСН –160А с дополнительными скребком для очистки стойл.
приводная звездочка транспортера;
натяжная звездочка;
поворотная звездочка;
звездочка привода дополнительного скребка.
Окружная скорость вращения звездочки привода дополнительного скребка определяется по формуле:
W=υ/R, (3.8.)где R – радиус звездочки привода дополнительного скребка.
W=0,18/0,15=1,1с-1 Число оборотов скребка определяется по формуле:n=30*W/П, (3.9.)
n=30*1,1/3,14=10,5 об/мин
Один полный оборот дополнительный скребок совершает за 6 секунд.
Условие эксплуатации учитывает коэффициент эксплуатации, который рассчитывается по формуле:
Кэ = Кφ * Кт *Кγ (3.10.)
где Кφ – коэффициент угла наклона линии центров звездочек к горизонт Кφ =1
Кт – коэффициент температуры окружающей среды, Кт =1
Кγ - ккоэффициент ударности, учитывающий характер нагрузки,
Кγ=1,01 [15. с. 85]
Передаточное число цепной передачи U =1, т.к. число оборотов звездочек равны между собой.
Вращающий момент цепной передачи определяется по формуле :[15. с. 83]
M=9550*N/n (3.11.)М=9550*4/10,5=3351Нм
Полезное усилие, передаваемое цепью рассчитывается по формуле:
Р=1000 N/ υ (3.12.)
Р=1000*4/0,18=22 кН
Проверочный расчет привода транспортера проводится по формуле:
Nов=КРυ/102т, (3.13.)
где К – коэффициент, учитывающий сопротивление от натяжения на
приводной звездочке, К=1,1 [4. С. 401]
Nов=1,1*1630*0,18/102*0,8=3,6кВт
Для привода данного транспортера принимается электродвигатель, входящий в комплект поставки транспортера [26. С.5]
Для горизонтального транспортера электродвигатель 4а 112МВБСУ1 исп. 1М3081 ТУ16 –510.536-79 мощность 4 кВт с частотой вращения 16,7 с-1 (1000об/мин);
Для наклонного транспортера элетродвигатель 4А80В4БСУ1 исп. 1М3081 ТУ16-510.375-79 мощностью 1,5 кВт с частотой вращения 25 с-1 (1500 об/мин)
Передаточное число привода горизонтального транспортера 71,4 наклонного – 27,85.
3.6. Расчет на прочность скребка и вала устройства для
очистки стойл
3.6.1. Расчет скребка. Исходные данные:
1. материал скребка капрон ТУ-6-0-6-309-70
2. площадь поперечного сечения скребка, м2 1,2*10-3
3. допустимое напряжение на изгибе, Н/м2 3924*104
4. предел прочности, Н/м2 8829*104
5. сила сопротивления навоза скребка, Н 103
Скребок работает на изгиб. Условие прочности при изгибе имеет следующий вид:
ζ = М/Wx ≤ [ζ ]u, (3.14.)
где ζ – напряжение, возникающее в поперечном сечении скребка под
действием силы сопротивления навоза, Н/м2;
М – максимальный изгибающий момент, Нм;
[ζ ]u – допустимое напряжение на изгиб для капрона, Н/м2;
Wx – момент сопротивления поперечного сечения скребка относительно
нейтрального слоя, м4 (рис3.7)
Wx=ав2/6, (3.15.)
где а – ширина поперечного сечения скребка, м;
в – высота поперечного сечения скребка, м.
Wx=0,01*0,122/6=2,4*10-5 м4
Рис.3.7 Поперечное сечение Рис.3.8. Схема действия силы
скребка . сопротивления навоза.
Максимальный изгибающий момент определяется по формуле:
М=Р*L, (3.16.)где Р – сила сопротивления навоза скребку, Н;
L – плечо, на котором действует сила, м (рис.3.8).
М=103*0,6=61,8Нмζ =61,8/2,4*10-5=257,5*104 Н/м2
ζ < [ζ]u257,5*104
Похожие работы
... электробезопасности должны знать прежде всего электромонтеры, механизаторы, разнорабочие, а также представители других профессий, связанные с электричеством непосредственно или косвенно. Животноводческая ферма крупно рогатого скота запитана от трансформаторной подстанции с глухозаземленной нейтралью. Сеть выполнена четырехпроводой. Нулевой провод повторно заземляется в конце линии при вводе в ...
... 1 РАСЧЕТ И ОПИСАНИЕ ГЕНПЛАНА ОТКОРМОЧНОЙ ФЕРМЫ 1.1 Обоснования системы содержания и структуры поголовья Проектируемая ферма предназначена для круглогодового привязного содержания с использованием интенсивных методов откорма молодняка крупного рогатого скота. При привязном содержании животных размещают в индивидуальных стойлах на привязи. Кормление и поение скота организуется в стойлах. ...



... труда и культуру производства и найти своего покупателя при жесткой конкуренции на потребительском рынке /14/. Цель и задачи исследования Цель исследования: «Разработка технологии горячего блюда из мяса птицы и подбор средств измерения контроля качества». Задачи: - подбор основного сырья — мяса курицы; - разработка технологии горячего блюда; - подбор средств измерения ...
... как этот способ содержания животных даст хозяйству экономию кормов и подстилки, индивидуальный уход за коровами. ГЛАВА 2. ОРГАНИЗАЦИЯ ПРОИЗВОДСТВА МОЛОКА НА МТФ НА 600 ГОЛОВ КРС 2.1 Выбор технологии содержания животных Условия содержания животных на молочно-товарных фермах зависят от хозяйственных и других конкретных условий. В настоящее время на фермах крупного рогатого скота применяются ...
0 комментариев