Параллельность процессов производства также существенно влияет на производительность
Классификация систем управления. Их характеристики
Функциональные системы программного управления. Характеристика
Классификация промышленных роботов
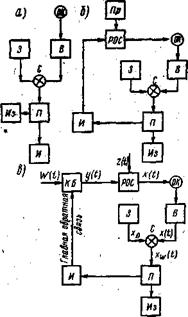
Система автоматического регулирования. Принципы построения и анализ
Навигация
Классификация промышленных роботов
Автоматизация производственных процессов
78281
знак
2
таблицы
8
изображений
198. Классификация промышленных роботов
Говоря об общей классификации робототехнических систем, можно указать следующие их большие классы:
- манипуляционные;
- мобильные движущиеся;
- информационные и управляющие.
Наиболее развитые и практическое применение получили манипуляционные робототехнические системы различных типов.
Мобильные движущиеся робототехнические системы представляют собой некоторые платформы или шасси, перемещением которых управляет автоматика. При этом кроме программы маршрута движения они имеют запрограммированную автоматическую адресовку цели, могут автоматически нагружать и разгружать. В промышленных целях они предназначаются для автоматической доставке деталей и инструмента к станкам и от станков к складам. На таких подвижных системах могут устанавливаться манипуляционные механизмы. К таково рода системам относятся движущиеся устройства для обслуживания автоматических складов в разных отраслях народного хозяйства.
В мобильных робототехнических системах используют любые принципы движения. Они могут быть колесными, шагающими, колесно-шагающими, гусеничными, летающими, плавающими и т.п.
Информационные и управляющие робототехнические системы представляют собой некоторые комплексы измерительно – информационных и управляющих средств, автоматически производящих сбор, обработку и передачу информации.
В промышленных целях – это системы автоматического контроля и управления для почти безлюдного производственного процесса, комплексно – механизированного, в том числе с групповым использованием промышленных роботов. Подобные системы применяют и в автоматических системах проектирования, при выполнении технических и экономических расчетов и др.
Рассмотрим более подробно класс манипуляционных робототехнических систем. Их можно разделить на три вида (рис.1).
1. Автоматические движущиеся роботы, автоматические манипуляторы и роботизированные технологические комплексы;
2. Дистанционно управляемые роботы, манипуляторы, технологические комплексы;
3. Ручные, непосредственно связанные с движением рук, а иногда и ног человека.
Первые из них применяют в основном в промышленном производстве (промышленные роботы и роботизированные комплексы), а вторые главным образом – в экстремальных условиях, т.е. при наличии радиации, загазованности, взрывоопасности, высоких и низких температур и давлений. Третий вид применяют для погрузочно – разгрузочных и тяжелых работ.
Автоматически действующие манипуляционные роботы делят ив четыре рода: жестковстроенные, программные, адаптивные и «интелектные». Вместо термина «род» применяют также «поколение». Но, поскольку жестковстроенные машины еще не являются, роботами, они представляют собой нулевое («доработанное») поколение. Программные - первое поколение, адаптивные – второе поколение, интелектные – третье поколение. Однако здесь в отличие от вычислительной техники эти поколения не сменяет друг друга, а существуют параллельно, развиваясь внутри каждого из них. Поэтому четвертого поколенья роботов нет, а искусственный интеллект третьего поколения может развиваться почти неограниченно по мере развития науки я техники, а также возможность использования все новых поколений микро ЭВМ.
Охарактеризуем каждое из этих покаленей автоматически действующих робототехнических систем.
Рисунок 1
| Класс | Манипуляционные робототехнические системы (роботы, манипуляторы и РТК) | ||||||||||||||||||||||||||||||||||
| Вид | Автоматически действующие | Дистанционно управляемые | Ручные | ||||||||||||||||||||||||||||||||
| Род | Жестковстроенные | Программные | Адаптивные | Интелектные | Комендные | Копирующие | Полуавтоматические | Супервизорные | Диалоговые | Шарнирно-балансирный ые | Экзоскелетоны | ||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||
| Различные типы роботов | |||||||||||||||||||||||||||||||||||
Жестковстроенные манипуляторы не имеют перестраевыемых программных управляющих устройств. Это механические руки (автооператоры). Они жестко связан с остальным технологическим оборудованием, подчиняясь определенной программе технологического процесса в целом. Их применение, в частности, характерно для замены ручного труда в массовом производстве, например, на линиях сборки механизмов на часовых заводах.
Программные роботы (первое поколение роботов) имеют управляемые приводы во всех суставах, и система управления легко переналаживается на различные, ручные операции. Но после каждой переналадки они повторяют многократно одну в ту к же жесткую программу, в строго определенной обстановке, с определенно расположенными предметами. Таково большинство современных промышленных роботов, выполняющих вспомогательных операций у штампов, станков, линейных машин и т.п. Такой робот будет совершать те же движения, если даже детали не на месте. Кроме того, он требует создавал технологической оснастки упорядочивающей положение деталей. Но это сделать не всегда просто, а, главное жесткая оснастка затрудняет переналадку роботе на новые операции. Поэтому целесообразно бывает усложнить систему управления самого робота, т.е. перейти к применению второго поколения роботов.
Второе поколение - адаптивные роботы, т.е. такие, которые могут самостоятельно в большей или меньшей степени ориентироваться в нестрого определенной обстановке, приспосабливаясь к ней. Для этого их снабжают, во-первых, каками-либо датчиками, реагирующими на обстановку, и, во-вторых, системой обработки информации от датчиков для выбора сигналов адаптивного управления, т.е. гибкого изменения программы движения манипулятора в соответствии с фактической обстановкой. В настоящее время в таких системах широко используют компактные микропроцессорные устройства.
Адаптивные промышленные роботы необходимы во всех случаях, когда трудно создать строго определенную обстановку, при обходе препятствий, при работе с движущимися на конвейере деталями, в сборочных операциях, при дуговой сварке, окраске, нанесении покрытий и в других операциях. Адаптивные роботы второго поколения широко разрабатываются и эксплуатируются на производстве.
Третье поколение - интеллектные роботы с более богатым очувствлнием, с микропроцессорной обработкой информации, распознаванием обстановки, с автоматической выработкой роботом решения о своих дальнейших действиях, для выполнения нужных технологических операций в неопределенной или меняющейся обстановке - это роботы с элементами искусственного интеллекта.
Дистанционно управляемые роботы и манипуляторы по классификационной схеме делятся на пять родов:
манипуляторы с командным управлением,
копирующие манипуляторы,
полуавтоматические манипуляторы,
роботы с супервизовым управлением,
роботы с диалоговым (интерактивным) управлением.
Только два последних из них названа роботами, так как они наряду с дистанционным управлением имеют полностью автоматически режимы работы.
Манипуляторы с командным управлением отличаются тем, что человек-оператор включает по отдельности приводы каждого сустава манипулятора дистанционно путем нажатия на соответствующие кнопки или тумблеры. Такие манипуляторы применяют, например, на обитаемых подводных аппаратах.
В таком же командном режиме часто производится «обучение» промышленного робота с пульта управления. По аналогичному принципу работают и так называемые телеоператоры, находящиеся в опасной зоне.
Копирующие манипуляторы, находящиеся в опасной зоне, управляются дистанционно человеком - оператором с удаленного безопасного места при помощи задающего устройства, кинематически подобного рабочему манипулятору. При этом движение каждого сустава задающего механизма передается на соответствующий сустав рабочего манипулятора по принципу следящей системы. Такие манипуляторы применяют для работ при наличии радиации, загазованности и в других экстремальных условиях.
Полуавтоматические манипуляторы в отличие от копирующих в качестве задающего устройства на пульте оператора имеют компактную многостепенную управляющую рукоятку, кинематика которой может быть произвольной, удобной для малых движений руки человека. Снимаемые с нее электрические сигналы преобразуются с помощью специализированного вычислителя в сигналы управления на приводы манипулятора. Здесь возможны различные алгоритмы управления.
Роботы с супервизорным управлением характеризуются тем, что элементы выполняемых ими операций запрограммированы и могут воспроизводиться автоматически. Человек-оператор, наблюдающий дистанционно за действиями робота, установленного в опасной зоне, подает только отдельные переуказательные команды, по которым включается та или иная программа автоматического действия робота. За человеком остается лишь функция распознавания обстановки и принятая решений. После подачи им целеуказательной команды робот действует по определенной программе. Если этот робот являемся адаптивным, то человек-оператор может подавать более редкие и более «глобальные» команды.
Роботы с комбинированным управлением - это роботы, в которых сочетаются автоматические режимы (как у роботов с супервизорным управлением) с режимами управления от руки (как у полуавтоматического или копирующего манипулятора). Их применяют на необитаемых подводных аппаратах, во взрывоопасных и горячих цехах, для безлюдной работы в шахтах, в атомной энергетике а т.п. Такое комбинированное управление используют в различных типах телеоператоров.
Роботы с диалоговым (интерактивным) управлением, как правило, являются интеллективными, а отличаются от супервизовых тем, что робот не только принимает команды человека для их исполнения, но и сам активно участвует в распознавании обстановка и принятии решения, помогая в этом человеку-оператору.
Наконец третий вид манипуляционных робототехнических систем (ручные) делятся на шарнирно-балансирные манипуляторы и экзоскелетоны (усилители конечностей человека).
Шарнирно–балансный манипулятор представляет собой многозвенчатый механизм с приводами в каждом суставе, которые при любой величине удерживаемого манипулятором груза (в пределах его rpyзoподъемности) при любом расположении звеньев в пространстве находится в равновесии. Поэтому человек, взявшись за рукоятку манипулятора, легко может перемещать большой груз. Двигая рукоятку, человек осуществляет подачу управляющих сигналов, при этом вся работа по перемещению груза выполняется приводами, размещенными в суставах манипулятора. Такие системы удобны для погрузочно- разгрузочных работ.
Экзоскелетоны - многозвенные механизмы, звенья которых непосредственно сопряжены с руками или ногами человека. В суставах механизма, соответствующих суставам человека, в этом случае также помещены управляемые двигатели, берущие на себя всю тяжесть работы. Движения самого человека формируют лишь сигналы управления. Такие системы применяют для усиления конечностей человека. Это бывает полезно для выполнения тяжелых работ и движения по труднопроходимой местности. Экзоскелетоны можно встраивать, например, в водолазные костюмы для облегчения и усиления действий водолазов, когда это необходимо.
На рис.1 вертикальными линиями показаны типа, на которые делится каждый род (поколение) роботов. Этих типов может быть достаточно много. Они различаются принципами и техникой построения управляющих устройств, приводов в суставах манипулятора, числом звеньев манипулятора, грузоподъемностью, видом очувствления, математическим программным обеспечением и т.п.
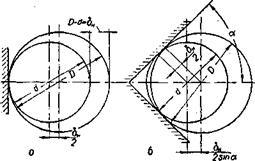
Для полной ориентации объекта необходимы три степени подвижности, которые обычно реализуются тремя вращательными парами, осуществляя повороты охвата в горизонтальной, вертикальной плоскостях и вокруг оси схвата.
ПР могут быть колесными, гусеничными и стопоходящими (шаговыми). Тип рабочей зоны - одна из важных характеристик – это фигура описываемая при прохождении им предельно достижимых положений.
Для общей характеристики достаточно качественно определить тип рабочей зоны - рабочая зова на плоскости, в сфере, на поверхности параллепипеда, цилиндрическая, шарообразная или комбинированная.
Этим типам соответствуют разные системы координат.
Грузоподъемность - это масса перемещаемых изделий и орудий труда
да. Подразделяют:
- сверхлегкие (ряд грузоподъемностей 0,1; 0,16; 0,25; 0,4; 0,63; 1,0 кг);
- легкие (1,5; 2,5; 4,0; 6,3; 10,0 кг);
- средние (16, 25, 63, 100 кг);
- тяжелые (160, 250, 400, 630, 1000 кг);
- сверхтяжелые (свыше 1000 кг).
Тип приводов - пневматический, гидравлический и электромеханический. Часто применяют комбинации, например, тип привода охвата может отличаться от типа приводов звеньев манипулятора.
Типы систем управления разделяют по принципу управления: роботы с программным управлением, очувствительные роботы и роботы с искусственным интеллектом.
В первом случае работает жесткая программа. Во-втором - управление ведется с учетом фактического состояния внешней среды, в третьем - робот снабжают устройствами очувствления (сенсорикой), в виде тактильных, локационных, телевизионных и других устройств.
Системы управления очувствленных роботов делятся на неадаптивные и адаптивные. Роботы с искусственными интеллектами являются дальнейшим развитием очувствлении роботов в части алгоритмов функционирования и соответствующего сенсорного обеспечения.
По типу движения по отдельным степеням подвижности системы управления делятся на СУ непрерывного (контурного) и дискретного (позиционного) управления движением.
По числу управляемых ПР системы управления делятся на системы индивидуального и группового управления.
Под классом точности позиционирования и воспроизведения траекторий обычно понимается абсолютная точность позиционирования схвата, однако более объективно класс точности определяется относительной погрешностью позиционирования или воспроизведения траекторий.
Относительная погрешность - это величина, характеризующая точность ПР и равная отношению абсолютной ошибки перемещения схвата в заданную точку к минимальному расстоянию от оси ближайшей к основанию робота кинематической пары до границы рабочей зоны, выраженная в процентах. ПР различают также по типам исполнения - нормальное, пылезащитное, теплозащитное, взрывобезопасное и т.п.
Еще один признак - "назначения" по степени универсальности:
- специальные ПР - для деталей одного типа;
- специализированные - для деталей одного класса;
- универсальные ПР.
При классификации существующих и создаваемых роботов могут быть использованы различнее подхода, наиболее распространенными из которых являются разделение (ПР) по поколениям.
К ПР первого поколения относятся наиболее простые, легко перестраиваемые автоматы, вся последовательность действий которых заранее определяется жесткой программой. Для таких систем оператор является единственным источником информации о требуемых действиях и вводит ее в процессе обучения робота в запоминающее устройство. Информация, вводимая в процессе программирования, включает в себя данные о последовательности движений и положений звеньев манипулятора в соответствуйте моменты времени.
Для жесткопрограммируемых роботов в процессе обучения могут быть применены три способа программирования: ручной, полуавтоматический, автоматический. При ручном способе оператор участвует во всех этапах программирования, имитируя перемещение захвата манипулятора в нужные точки рабочей зоны. При этом координаты точек записываются в кодах на программоноситель. При полуавтоматическом программировании оператор участвует в нескольких этапах формирования программы. При автоматическом - задача оператора сводится к укрупненному формированию программы и предварительных давних управляющему устройству.
ПP второго поколения представляют собой гибкопрограммируемые устройства, оснащенные средствами, позволяющими получать информацию о свойствах внешней среды. Причем изменения окружающей обстановки должны быть заранее определены так, чтобы в ходе выполняемой работы робот мог автоматически скорректировать программу в соответствии с ними (неадаптируемые ПР). Более сложные, так называемые адаптивные (очувствительные) роботы могут заполнять различные операции в условиях заранее неизвестных изменениях окружающей обстановки.
К промышленным роботам третьего поколения относятся устройства с развитой сенсорной системой, высоким уровнем автоматичности и самостоятельности поведения в изменяющейся неупорядочной среде. Их называют интегральными роботами. Роль человека в управлении ими должна сводиться лишь к принципиальному анализу обстановки, принятию решений, носящих обобщенный характер, и выдаче целевых указаний на языке микропрограмм.
Похожие работы
... Ориентировочный объем раздела КИП и А в дипломном проекте - 10...15 страниц рукописного текста. Графическая часть состоит из одного чертежа - функциональной схемы автоматизации заданного технологического процесса. Подробные указания по выполнению функциональной схемы приведены в разделе 4. 3. УКАЗАНИЯ ПО ВЫБОРУ СРЕДСТВ АВТОМАТИЗАЦИИ Конкретные типы средств автоматизации выбирают с учетом ...
... деталей винта и шайбы. Описан технологический процесс автоматизированного сборочного участка с применением бункерно-загрузочных устройств, ориентируещего приспособления, отсекающих механизмов, транспортеров. СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ.Автоматизация производственных процессов. Шаумян Г.А. ’’ Высшая школа ’’, 1967, -172с. Автоматизация процессов в машиностроении. Учеб. пособие для вузов. ...
... сопряжения их. Устройства автоматического контроля. Контрольные автоматы классификация по назначению. Разработка новых высокопроизводительных методов и все шире внедряющаяся автоматизация технологических процессов обработки деталей машин привели к существенному снижению трудоемкости их изготовления. Производительность процессов контроля пока растет медленнее. Увеличивается количество ...
... решить только на основе широкого внедрения автоматики в производственные процессы и внедрить автоматизированные системы в различные сферы хозяйственной деятельности, и в первую очередь в проектирование, управление оборудованием и технологическими процессами. Поднять уровень автоматизации производства примерно в 2 раза. Создавать комплексно-автоматизированные производства, которые можно быстро и ...
0 комментариев