Параллельность процессов производства также существенно влияет на производительность
Классификация систем управления. Их характеристики
Функциональные системы программного управления. Характеристика
Классификация промышленных роботов
Система автоматического регулирования. Принципы построения и анализ
Навигация
Система автоматического регулирования. Принципы построения и анализ
Автоматизация производственных процессов
78281
знак
2
таблицы
8
изображений
208. Система автоматического регулирования. Принципы построения и анализ
Рассмотрим структурную схему системы управления в общем виде (рис. 7.1). Объект управления - это некий механизм, агрегат или устройство, либо технологический, энергетический процесс, желаемое поведение и протекание которого должно быть обеспечено.
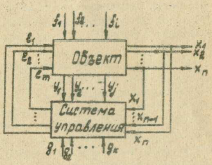
Рис 7.1
Поведение объекта управления, результат его действия определяются некоторыми показателями хn. Чаще всего ими являются значения физических величин, которые называют выходными величинами объекта управления. К ним относят наиболее важные для оценки поведения объекта и его практического использования величины.
Кроме этих основных параметров, работа объекта характеризуется рядом вспомогательных параметров yi , которые также должны контролироваться и регулироваться (например, поддерживаться постоянными).
В процессе работы на объект поступают возмущавшие воздействия f1, f2,…,fi, вызывающие отклонение параметров xn. Информация о текущих значениях xn и yi поступает в систему управления и сравнивается с предписанными им значениями g1, g2,…,gк, в результате чего система управления вырабатывает управляющие воздействия Е1, Е2,...,Еmдля компенсации выходных параметров.
Входные воздействия, с точки зрения их влияния на действие объекта и на его выходные величины xn, разделяются на две принципиально отличные группы. Некоторые из входных воздействий обеспечивают желаемое изменение поведения объекта, достижение поставленных целей. Такие входные воздействия называют управляющими Еm и при их отсутствии задача управления вообще не имеет решения. При ручном управлении такие воздействия на объект осуществляет оператор, при автоматическом - система управления (см. рис. 7.1).
Другие входные воздействия fi , напротив, мешают достижению цели и изменять их, как правило, невозможно. Такие воздействия называют возмущающими или помехами.
Задача управления, по существу, заключается в формировании такого закона, при котором достигается желаемое поведение объекта.
Сложная и разносторонняя задача управления в подавляющем большинстве случаев включает более узкую задачу регулирования. Задача регулирования заключается в поддержании выходных величин объекта равными (или пропорциональными) некоторым эталонным функциям времени - задающим воздействиям. Последние могут быть постоянными или изменяющимися как по заданному, так и по заранее неизвестному закону. В нашем случае объектами регулирования выступают вспомогательные параметры yi.
Существуют различные принципы автоматического регулирования. Самый простой из них основан на использовании разомкнутых систем, применяемых в тех случаях, когда можно пренебречь влиянием возмущающих воздействий.
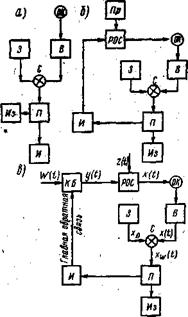
1. Разомкнутая система регулирования (рис.7.2) действует следующим образом. При изменении задающего воздействия g формирующий элемент 3 вырабатывает необходимое "указание" исполнительному механизму 2, Последний создает регулирующее воздействие z на объект регулирования 1. В результате регулируемая величина y приближается с той или иной точностью к требуемому значению.
Формирующий элемент и исполнительный механизм составляют регулятор. Регулятор и объект в совокупности образуют систему регулирования.
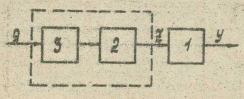
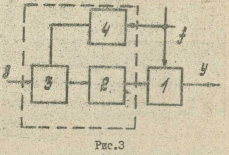
Рис 7.2 - Рис 7.3
При конструировании подобного регулятора необходимо знать все свойства объекта регулирования, тогда при условии отсутствия возмущений можно правильно предвидеть влияние задающего действия на регулирующею величину.
Область применения системы регулирования ограничена тем, что нельзя пренебречь влиянием возмущений. При определенном задающем воздействии и различных возмущениях выходная величена объекта (регулируемая величена) будет иметь разные значения и, следовательно, задача регулирования не будет решена. В связи с этим возникает необходимость контроля возмущений или хотя бы основного из них возмущения f (рис.7.3). Это возмущение нужно измерить и при его изменениях создавать дополнительное воздействие на объект, компенсирующее влияние возмущений. В регуляторе оказывается необходимым еще элемента 4, который через формирующий элемент 3 создает компенсирующее воздействие исполнительного механизма2 на объект 1
Рассмотренные системы является разомкнутыми: в них регулируемая величена y не влияет на действие регулятора. Это значит, что характер регулирующих воздействий зависит от свойства объекта лишь в той степени, в какой это учтено при конструировании регулятора. Однако из-за изменения свойств объекта» влияния второстепенных возмущений действительное значение регулируемой величины может значительно отличаться от требуемого значения. К тому же, в подавляющем большинстве случаев отсутствует исчерпывающая и достоверная информация о свойствах объекта регулирования и о характере возмущений, и разомкнутые системы регулирования оказываются неэффективными. Поэтому прибегают к созданию более современных замкнутых систем автоматического регулирования (САР).
2. В замкнутой системе используется принцип обратной связи. Такая система в простейшем случае (рис.7.4) состоит из объекта регулирования 1 и регулятора, который кроме исполнительного элемента 2 и формирующего элемента 3 имеет еще измерительный элемент 4 и элемент сравнения 5.
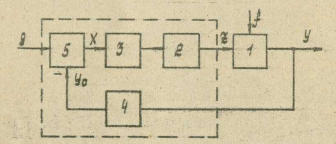
Рис. 7.4
Измерительный элемент 4 осуществляет обратную связь в системе - обеспечивает влияние регулируемой величины y на вход системы. Сигнал y0, пропорциональный регулируемой величине, сравнивается с задающим воздействием g. Если регулируемая величина отклонилась от требуемого значения, то изменяется сигнал рассогласования (сигнал ошибки) x=g-y0, который воздействует на элемент 3. Затем воздействие передается на исполнительный элемент 2 и на объект. В результате отклонение регулируемой величины от требуемого значения устраняется (с определенной степенью точности).
Таким образом, в замкнутой системе воздействие на объект формируется не только в зависимости от задающего воздействия, как в системе, показанной на рис.2, но и от состояния объекте и наличия возмущений. Точнее, регулирующее воздействие определяется отклонением регулируемой величины от заданного значения. Такие регуляторы носят название регуляторов по отклонению. Принцип обратной связи позволяет успешно решать задачу регулирования, несмотря на некоторую неопределенность или неточность в известных конструктору характеристиках объекта регулирования и исполнительного механизма, а также сведениях о возмущениях.
Можно видеть, что в замкнутой САР по отклонению нет необходимости получать информацию непосредственно о задающем воздействия, которое используется лишь для сравнения с сигналом обратной связи, и о возмущениях, однако это допустимо не всегда. В некоторых случаях качество такого регулирования оказывается неприемлемо низким. Тогда обеспечивается комбинированное регулирование, т.е. сочетание принципов замкнуто - разомкнутой систем.
3. При комбинированном регулировании создается дополнительная связь 6 по возмущению (рис.7.5), которая компенсирует влияние возмущения "в основном", а замкнутый контур устраняет рассогласование, возникающее при изменениях задающего воздействия и вследствие неточности действия дополнительной связи 6. Используются также комбинированные системы с дополнительной связью 7 по задающему воздействию (pиc. 6), которая и обеспечивает "в основном" его воспроизведение регулируемой величиной. Замкнутый контур в этом случае устраняет рассогласование, возникающее из-зa неточности действия дополнительной связи 7 и от возмущений.
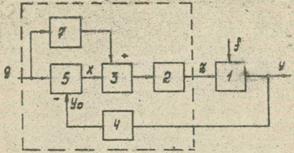
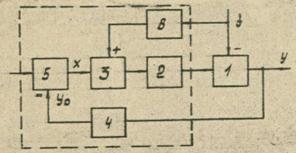 Рис. 7.5 Рис. 7.6
Рис. 7.5 Рис. 7.6 Основным источником информации служит программа управления. Она может быть сообщена системе заранее. В программе даются сведения о характере движения рабочих органов их синхронизации, режимах работы, различные технологические и другие команды.
Другим источниками информации является сам ТП. Существующие датчики позволяют получить информацию о фактическом положении, скорости движения рабочего органа, размере обрабатываемых поверхностей к т.п. Эту информацию называют информацией обратной связи, а датчик - датчиком обратной связи.
Источником возмущений служит окружающая среда (температура, влажность, колебания припуска заготовки, уровень вибрации и др.).
Количество каналов информации структура определяют качество работе систем управления. Чем больше используется каналов информации, тем выше качество работы системы, шире ее функциональные возможности.
Использование только одного канала информации значительно упрощает конструкцию системы управления, однако нормальное функционирование такой системы требует высокого качества изготовления ее элементов.
В замкнутых системах управления, в которых для снижения технологических требований к отдельным элементам и повышения качества работа систем применяют обратные связи, используют два канала: канал задающей информации к канал обратной связи. Сопоставление задавшей информации с информацией обратной связи осуществляется в сравнивающем устройстве, на выходе которого вырабатывается команда, необходимая для управления приводом. Качество работы замкнутой системы выше, чем разомкнутой, при некотором осложнении ее конструкции. В замкнутых системах управления обычно используются управляемые приводы, структуру с замкнутой схемой управления имеют большинство систем программного управления и копировальные системы.
Для оптимального управления течением ТП необходимо использовать два или более двух каналов дополнительной информации. Системы управления, использующие два или более двух каналов дополнительной информации и имеющие устройство для коррекции управляющего сигнала, можно отнести к классу приспосабливающихся систем.
В зависимости от вида информации, которая используется системами, последние делят на непрерывные, импульсные и смешанные СУ.
Система управления всей работой технологического оборудования включает в себя ряд систем управления элементарными циклами работа отдельных механизмов и осуществляет либо функциональное управление ИМЕ, либо просто включение, синхронизацию и блокировку. Такие системы называются системами управления общим автоматическим циклом или системами группового управления.
Закон регулирования в замкнутых САР определяется зависшее регулирующего воздействия z от рассогласования x (см. рис. 7.4) Простейшими законами регулирования являются пропорциональный когда z=c1x (система с П – регулятором). и интегральный, когда
![]()
(система с И -регулятора). Более совершенны системы, когда в законе регулирования кроме пропорциональной составляющей имеется интеграл от рассогласования:
![]()
(система с ПИ - регулятором). Наилучшие результаты получаются при введении в закон регулирования еще и производной от рассогласования:
![]()
(система с ПИД - регулятором). В комбинированных системах закон регулирования содержит, креме того, составляющих, зависящие от внешних воздействий.
Для обыкновенных САР достаточно определить реакции на некоторые эталонные воздействия и затем делать выводы относительно влияния внешних воздействий произвольного вида. На этом основании при расчетах обыкновенных САР широко используют метод передаточных функций и частотный метод.
Анализ устойчивости - это одна из основных задач анализа САР. Собственно, решение проблемы устойчивости и послужило началом теории автоматического регулирования.
Анализ динамического режима систем автоматического регулирования позволяет получить очень важные сведения об устойчивости замкнутой системы и ее быстродействии, так как устойчивость определяет ее работоспособность, а быстродействие влияет на динамическую точность и производительность.
При замыкании система, удовлетворяющая всем требованиям установившегося режима, часто оказывается неустойчивой. Неустойчивой система считается в том случае, если при снятии входного управляющего воздействия на выходе ее имеют место незатухающие колебания.
Следует отметить, что устойчивость, быстродействие и коэффициент усиления, являясь основными критериями оценки качества работы системы, находятся между собой в противоречии и между ними приходится искать компромиссное решение.
Математическая модель системы представляет собой дифференциальное уравнение, устанавливающее количественные и логические зависимости между отдельными элементами системы, а также между системой и объектом управления. Разработка математической модели упрощается при использовании "элементарных динамических звеньев", для которых известна дифференциальные уравнения и все необходимые характеристики. Однако наиболее развитые системы имеют математическую модель в виде сложных дифференциальных уравнений высокого порядка, решение которых в общем виде весьма трудоемко.
Одним из наиболее распространенных методов анализа САР является метод преобразования Лапласа-Карлсона. Этот метод основан на том, что заданные и искомые функции времени u (t ) (![]() ). При этом используется преобразование Лапласа-Карлсона:
). При этом используется преобразование Лапласа-Карлсона:
Использование преобразования Лапласа позволяет такие трудоемкие операции, как дифференцирование и интегрирование функции времени при нулевых начальных условиях, заменить соответственно делением и умножением на оператор р .
В результате, для получения изображения выходной величины достаточно изображение входной величины умножить на передаточную функцию системы:
Y(p)=x(p)W(p)
Метод применим для линейных уравнений с постоянными коэффициентами. Решение дифференциальных уравнений при этом не намного проще обычного, но использование таблиц с большим количеством изображений и оригиналов несколько упрощает анализ. Этот метод не дает представление о критериях качества.
Наиболее просто сведения о критериях качества определяются из кривой переходного процесса, получающейся на выходе системы при подаче на вход ступенчатого воздействия.
Рассмотрим типовую передаточную характеристику. О степени устойчивости здесь судят по величине перерегулирования h быстродействии - по времени переходного процесса tp или по времени Т0. Коэффициент усиления К у можно определить по кривой переходного процесса при подаче на вход системы скачка скорости.
Метод анализа переходного процесса СAP удобен при экспериментальном определении показателей качества. Им удобно пользоваться при исследовании систем на аналоговых вычислительных машинах методом электронного моделирования. Однако построение переходного процесса путем расчетов затруднено.
Наиболее полные сведения о системе регулирования можно получить по амплитудно-частотной характеристике (АЧХ) замкнутой системы. Быстродействие система в этом методе характеризуется резонансной частотой ![]() , полосой пропускания
, полосой пропускания ![]() на уровне 1 или частотой
на уровне 1 или частотой ![]() при затухав сигнала до уровня 0,707. Мерой устойчивости здесь служит показатель колебательности М. Процесс построения этой характеристики тоже является трудным.
при затухав сигнала до уровня 0,707. Мерой устойчивости здесь служит показатель колебательности М. Процесс построения этой характеристики тоже является трудным.
Одним из разновидностей частотного метода является метод логарифмических амплитудно - частотных характеристик.
Все методы применимы лишь к линейным или линеаризованным системам. Анализ нелинейных систем очень трудоемок.
Большое распространение получил метод моделирования на ЭВМ. Он имеет широкие возможности, позволяет, учитывать нелинейности, при этом снижается трудоемкость расчетов. Сущность метода моделирования заключается в замене системы или ее частей типовыми блоками, соединенными между собой определенным образом. Электронная модель имеет туже же физическую сущность описывается теми же дифференциальными уравнениями, что и реальная система, отличаясь от нее лишь масштабами и мощностью. Метод моделирования, удобно применять в сочетании с другими методам в качестве подготовительных.
Литература
1. «Имитационное моделирование технологических систем» Юрков Н.К. Учебное пособие – Пенза: Пенз. политехн. Институт, 1989 г
2. «Комплексная автоматизация процессов производства РЭА» Юрков Н.К. Учебное пособие - Пенза: Пенз. политехн. Институт, 1985 г
3. «Управление технологическими процессами производства радиоэлектронной аппаратуры» Юрков Н.К. Конспект лекций - Пенза: Пенз. политехн. Институт, 1986 г
4. «Технология и автоматизация производства радиоэлектронной аппаратуры» Учебник для втузов И.П. Бушминский, А.П. Достанко, О.Ш. Даутов и др - М.: Радио и связь, 1989 г
5. «Технология радио электронного аппарата строения» П.И. Буловский, В.М. Миронов – М.: «Энергия», 1971 г
Похожие работы
... Ориентировочный объем раздела КИП и А в дипломном проекте - 10...15 страниц рукописного текста. Графическая часть состоит из одного чертежа - функциональной схемы автоматизации заданного технологического процесса. Подробные указания по выполнению функциональной схемы приведены в разделе 4. 3. УКАЗАНИЯ ПО ВЫБОРУ СРЕДСТВ АВТОМАТИЗАЦИИ Конкретные типы средств автоматизации выбирают с учетом ...
... деталей винта и шайбы. Описан технологический процесс автоматизированного сборочного участка с применением бункерно-загрузочных устройств, ориентируещего приспособления, отсекающих механизмов, транспортеров. СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ.Автоматизация производственных процессов. Шаумян Г.А. ’’ Высшая школа ’’, 1967, -172с. Автоматизация процессов в машиностроении. Учеб. пособие для вузов. ...
... сопряжения их. Устройства автоматического контроля. Контрольные автоматы классификация по назначению. Разработка новых высокопроизводительных методов и все шире внедряющаяся автоматизация технологических процессов обработки деталей машин привели к существенному снижению трудоемкости их изготовления. Производительность процессов контроля пока растет медленнее. Увеличивается количество ...
... решить только на основе широкого внедрения автоматики в производственные процессы и внедрить автоматизированные системы в различные сферы хозяйственной деятельности, и в первую очередь в проектирование, управление оборудованием и технологическими процессами. Поднять уровень автоматизации производства примерно в 2 раза. Создавать комплексно-автоматизированные производства, которые можно быстро и ...
0 комментариев