Особливості процесу сушіння деревини
Способи сушіння деревини
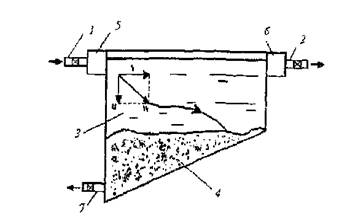
Сушіння в рідинах
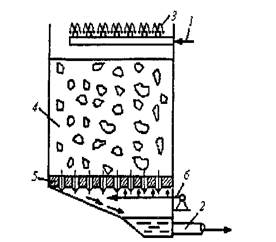
Ротаційний спосіб сушіння
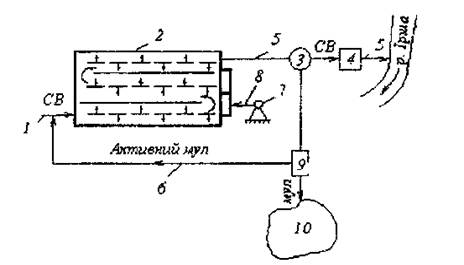
Технологічний процес сушіння деревини
Волога в деревині
Контроль за вологістю деревини і внутрішніми напруженнями у процесі сушіння
Вплив сушіння деревини на її міцність
Вдосконалення схеми
Розрахунок контуру регулювання температури
Проектування автоматизованої системи керування процесом сушіння деревини
Сенсор відносної вологості
Центробіжний вентилятор
Вибір мікроконтролера
Особливості мікроконтролерів PIC16F87X
Структура та метрологічні характеристики каналів контролю і регулювання
Функціональна структура системи управління
Загальні відомості про систему проектування друкованих плат P-CAD
Графічний редактор принципових схем P-CAD Schematic
Безпека при експлуатації парових і водогрійних котлів
Техніка безпеки при транспортних роботах в сушильних цехах
Навигация
Розрахунок контуру регулювання температури
Автоматизація процессу сушки деревини
147788
знаков
20
таблиц
31
изображение
2.2 Розрахунок контуру регулювання температури
Контур регулювання температури містить в собі давач температури та позиційний регулятор.
Розглянемо детальніше регулятор. Позиційні регулятори працюють по принципу “ввімкнено-вимкнено”. Їхня реалізація здійснюється за допомогою контактних та безконтактних релейних елементів. Позиційні регулятори бувають дво-, трьох- та багатопозиційні.
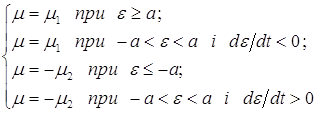
В системі регулювання вибираємо двопозиційний регулятор. Регулятор настроюється так, щоб його статична характеристика ![]() була розміщена кососиметрично відносно заданого приросту регулюємої величини, а значення µ та ε відраховувались в приростах від умовної рівноваги об’єкту регулювання, що відповідає розрахунковим значенням µ0 та ε0 ,прийнятим за початок відліку.
була розміщена кососиметрично відносно заданого приросту регулюємої величини, а значення µ та ε відраховувались в приростах від умовної рівноваги об’єкту регулювання, що відповідає розрахунковим значенням µ0 та ε0 ,прийнятим за початок відліку.
Статична характеристика двопозиційного регулятора з зоною неоднозначності:
 , (20)
, (20)
З попереднього рівняння видно, що двопозиційні регулятори постійно здійснюють на об’єкт регулювання вплив, відмінний від значення необхідного для рівноважного стану системи (ε=0). В результаті цього автоматична система з двопозиційним регулятором працює в автоколивальному режимі в околі її рівноважного положення. Статична характеристика µ=f(ε) зображена на рис. 2.1.
Для визначення оптимальних параметрів настроювання регулятора складемо структурну схему автоматичної системи з регулятором (рис. 2.1)
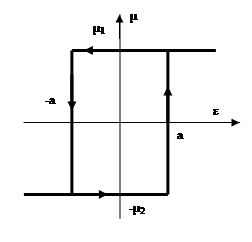
Рис.2.1 Статична характеристика двопозиційного регулятора з зоною неоднозначності
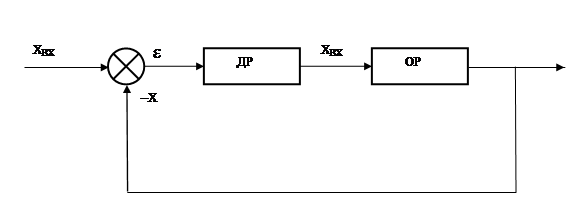
Рис.2.2. Структурна схема автоматичної системи з двопозиційним регулятором
В першому наближенні об’єкт регулювання ОР (вакуумна камера) описується передаточною функцією
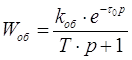 , (21)
, (21)
де
kоб – коефіцієнт передачі об’єкта регулювання;
τ0 – стала запізнення об’єкта регулювання;
Т – постійна часу об’єкта регулювання.
Розрахуємо kоб, використовуючи формулу (16):
 , (22)
, (22)
де kK – коефіцієнт теплопередачі калориферу, kK =13 ккал/м2град;
FK – поверхня калорифера, FK =12 м2;
kог – середній коефіцієнт теплопередачі огороджень kог=2;
α – коефіцієнт теплообміну деревини в процесі сушіння
α=5,1ккал/год·м2·град;
FД – поверхня деревини, FД =80 м2.
Постійна часу об’єкта буде рівна:
 хв, (23)
хв, (23)
Згідно характеристик лісосушильної камери вибираємо, що відношення
![]() . Тоді
. Тоді ![]() хв, (24).
хв, (24).
Параметри позиційного регулятора вибираємо за допомогою середовища MATLAB. У середовищі MATLAB система регулювання має вигляд (рис. 2.3.).
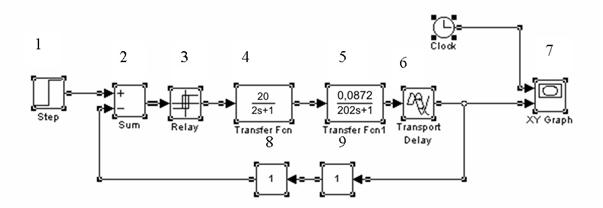
Рис. 2.3. Зовнішній вигляд системи регулювання в середовищі 3MATLAB.
Опишемо блоки зображені на рисунку:
1– генерує одноступінчату вхідну функцію (одиничний стрибок);
2– суматор;
3– блок, який реалізує двопозиційне реле з зоною неоднозначності;
4– блок, який описує передаточну функцію виконавчого механізму;
5 і 6 – блоки які описують передаточну функцію об’єкта регулювання.
7 – блок, що реалізує графічне відображення результатів дослідження;
8,9 – блоки, що описують передаточні функції перетворювача та давача.
Ввівши розраховані в рівняннях (22), (23) та (24) коефіцієнти в відповідні блоки отримали перехідну характеристику (рис 2.4).
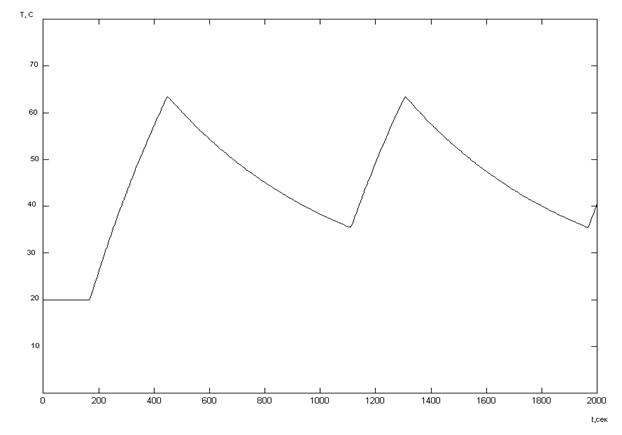
Рис.2.4. Перехідна характеристика вакуумної камери побудована за допомогою моделювання в MATLAB.
Проведемо деякі дослідження системи на стійкість за допомогою все тієї ж програми MATLAB. Спершу перевіримо систему на стійкість за загальною умовою стійкості, для цього побудуємо карту нулів та полюсів системи:
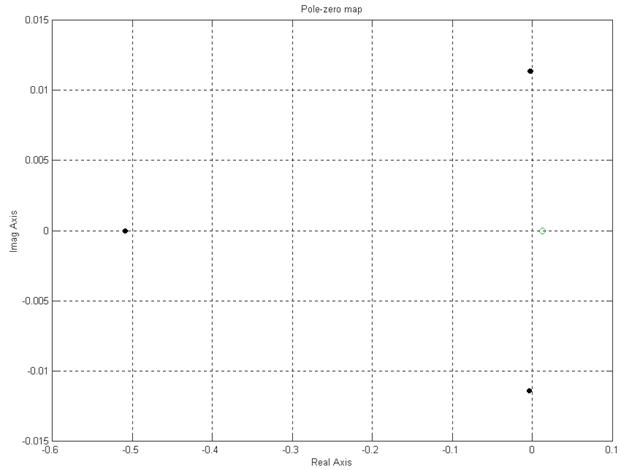
Рис.2.5. Карта нулів та полюсів системи.
На основі загальної умови стійкості та рис.2.5 можемо зробити висновок, що система є стійкою, оскільки всі корені характеристичного рівняння (нулі системи) знаходяться в лівій частині комплексної площини коренів.
Проведемо більш детальні дослідження і визначимо запаси стійкості системи по амплітуді та фазі. Для цього в середовищі MATLAB побудуємо графіки АЧХ та ФЧХ системи:
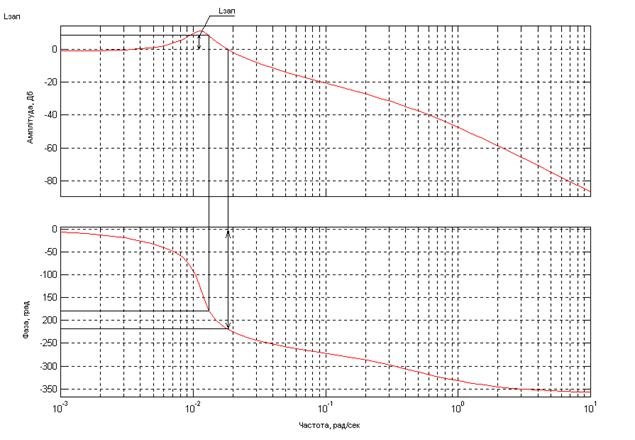
Рис. 2.6. АЧХ та ФЧХ системи
З побудованих графіків ми бачимо, що запас стійкості по амплітуді складає: Lзап=10 Дб, а запас стійкості по фазі: fзап=220 градусів. Дані значення перевищують мінімально допустимі, а тому можна сказати, що система є стійкою.
Похожие работы
... окремих деталей і вузлів на підприємствах, розташованих в районах видобування деревини, дозволяє більш ефективно використовувати відходи деревообробки для виробництва деревностружкових і деревноволокнистих плит. 2. Виробництво конструкцій із деревини В малоповерховому, сільському (склади мінеральних добрив тощо), цивільному (спортивні і концертні зали) будівництві знайшли застосування дерев ...
... і тирси розміром 1.5. 5 мм. 2. Виробництво виробів і конструкцій на неорганічних речовинах При виробництві блоків стін підвалів з бетонів класом по міцності при стиску В7,5 і В10 на підприємствах бетонних і залізобетонних конструкцій застосовують вторинні сировинні ресурси, які отримують внаслідок переробки некондиційних залізобетонних конструкцій і демонтованих з будинків і споруд з значним ...
... речовини, викиди поживних елементів, подібних до стоку добрив; осідання кислотних опадів, хвороботворні організми. Все це призводить до погіршення якості води і деградації водних ресурсів. Комплексна екологічна оцінка стану річок басейнів Дніпра за методикою, яка розроблена Українським НДІ водогосподарсько-екологічних проблем, показала, що немає жодного басейну, стан котрого можна було б класифі ...
0 комментариев