Навигация
Максимально допустимые ускорение и замедление
38433
знака
2
таблицы
9
изображений
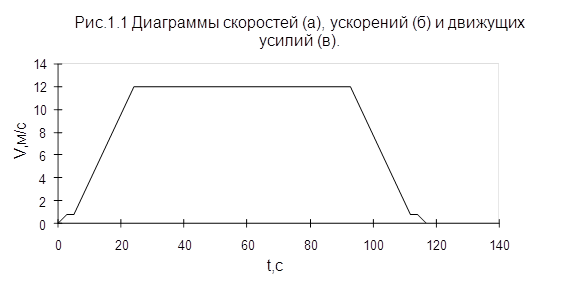
1.5.2. Максимально допустимые ускорение и замедление
(а1 max, а3 max) определяем по формулам :
![]() (1.15)
(1.15)
![]()
2,28(факт)>2(норма)
![]() (1.16)
(1.16)
![]()
где m1=Qc+qH=24,4×103+3×11,5×1079=61,6×103 кг;
m2=Qп+Qс+PH=25×103+244×103+4×8,4×1079=85,7×103 кг;
А=РLвш=4×8,4×44=1478,4 кг×м;
![]() - приведенная масса всех отклоняющих шкивов, кг;
- приведенная масса всех отклоняющих шкивов, кг;
Lвш - длина подъемного каната от уровня верхней приемной площадки до соприкосновения его с ведущим шкивом трения, м.
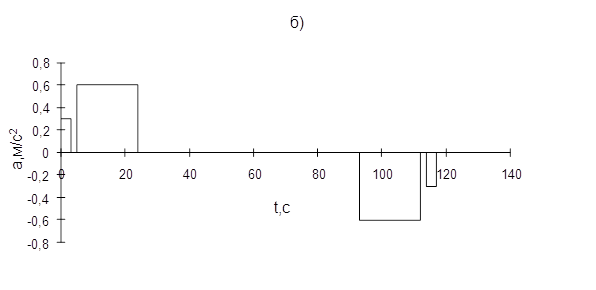
Примем семипериодную диаграмму скорости со значениями ускорения и замедления а1=а3=0,6м/с2, а¢=а²=0,3м/с2, что составляет менее 80% от максимально допустимых значений по правилам безопасности, и значениями скоростей V¢=V²=0,8м/с2.
1.6.Продолжительность подъемной операции1.6.1. Число подъемных операций в час nпч определили по формуле:
nпч=Ач/Qп=651×103/24,4×103=26. (1.17)
1.6.2. Расчетная продолжительность подъемной операции Трп определим по формуле:
Трп=3600/nпч=3600/26=139 с. (1.18)
1.6.3. Продолжительность движения подъемных сосудов Тр рассчитаем по формуле:
Тр=Трп-tп=139-11=128с, (1.19)
где tп - продолжительность паузы, с.
1.6.4. Среднюю скорость подъема Vср определяем по формуле :
Vср=Н/Тр=1079/128=8,4 м/с, (1.20)
где Н - высота подъема, м.
1.6.5. Ориентировочную максимальную скорость подъема Vmax рассчитаем по формуле:
Vmax=acVср=1,35×8,4=11,4м/с, (1.21)
где ас - множитель скорости , принимаемый 1,15¸1,35 [1].
1.6.6. Требуемую частоту вращения nктш рассчитаем по формуле:
nктш=60Vmax/pDктш=60×11,4/(3,14×5)=44 об/мин. (1.22)
1.6.7. Ориентировочная мощность приводного двигателя:
![]() (1.23)
(1.23)
где к - коэффициент, учитывающий сопротивление воздуха при движении подъемных сосудов, трение в подшипниках направляющих шкивов, жесткость канатов (к=1,1) [1];
Qп - масса полезного груза, кг;
Н - высота подъема, м;
g=9,81 м/с2 - ускорение силы тяжести;
Тр - продолжительность движения подъемных сосудов, с;
hп=0,93 - КПД подъемной установки;
r=1,3 - коэффициент динамического режима установки, учитывающий динамическую нагрузку, для скиповых многоканатных установок.
Наметим к применению двигатель типа П2-800-255-КУ4, мощностью 4000 кВт, с частотой вращения 50 об/мин [1].
1.7.Кинематика подъемной установки
1.7.1. Основание трапецеидальной диаграммы скорости То , соответствующий путь Но и модуль ускорения ам определим по формулам:
То=Тр-t¢-t¢1-t²1-t²+![]() =128-3-2-2-3+
=128-3-2-2-3+![]() =121 c,
(1.24)
=121 c,
(1.24)
где Тр - продолжительность движения, с;
t¢, t¢1, t², t²1 -продолжительность движения скипа при ходе по разгрузочным кривым, с;
V¢ и V² - скорость выхода из разгрузочных кривых и входа в них, м/с;
а1 и а3 - ускорение и замедление, м/с2.
![]() (1.25)
(1.25)
где Н - высота подъема, м;
hр - путь движения скипа в разгрузочных кривых, м.
ам=а1а3/(а1+а3)=0,6´0,6/(0,6+0,6)=0,3 м/с.
Причем продолжительность t¢, t¢1 движения порожнего скипа при ходе ролика его по разгрузочным кривым, продолжительность t², t²1 движения груженого скипа при ходе ролика по разгрузочным кривым определим по формулам:
t¢=t²=V¢/а¢=V¢/a²=0,8/0,3=3 с; (1.26)
 (1.27)
(1.27)
1.7.2. Продолжительность t1,t3 и путь h1,h3 движения скипа с ускорением а1 и замедлением а3 найдем по формулам:
![]() (1.28)
(1.28)
![]() (1.29)
(1.29)
1.7.3. Путь h2 и продолжительность t2 равномерного движения определим по формулам:
h2=Н-2hp-h1-h3=1079-2×2,4-122-122=830 м; (1.30)
t2=h2/Vmax=830/11,4=69 с. (1.31)
1.7.4. Расчетную максимальную скорость подъема Vmax определим по Формуле:
![]() (1.32)
(1.32)
1.7.5. Требуемая частота вращения:
![]() (1.33)
(1.33)
1.7.6. Продолжительность движения Т подъемных сосудов определили по формуле:
Т=t¢+t¢1+t1+t2+t3+t²1+t²=3+2+19+69+19+2+3=117 с. (1.34)
7.7. Фактический коэффициент резерва производительности Сф нашли по формуле:
![]() (1.35)
(1.35)
где С=1,5 - коэффициент резерва производительности [1].
Окончательно примем параметры диаграммы скоростей и ускорений:
V¢=V²=0,8м/с; t¢=t²=3с; hp=2,6м; Vmax=12м/с;
t1=t3=19с; h1=h3=122м; h2=830м; t2=69с;
a¢=a²=0,3м/с2; a1=a3=0,6м/с2; Т=117с; Н=1079м;
t¢1=t²1=2c .
1.8. Динамика подъемной установки1.8.1. Масса машины типа ЦШ-5´4 m¢м , отклоняющих шкивов m¢ош и двигателя типа П2-800-255-8КУ4 m¢д , рассчитаем по формулам:
m¢м=GD2м/gD2шт=6250×103/(9,81×52)=25,5´103кг; (1.36)
m¢ош=GD2ош/gD2шт=500×103/(9,81×52)=2039кг; (1.37)
m¢д=GD2д/gD2шт=2400×103/(9,81×52)=9786кг, (1.38)
где GD2м, GD2ош, GD2д - маховые моменты машины, отклоняющих шкивов и якоря двигателя, Н×м2.
1.8.2. Длину подъемных канатов Lпк определяем по формуле:
Lпк=Н+2hвк+pDшт/2=1079+2´35+3,14´5/2=1157м, (1.39)
где Н - высота подъема, м;
hвк - расстояние от верхней приемной площадки до оси шкива трения, м;
Dшт - диаметр шкива трения, м.
1.8.3. Длину уравновешивающих канатов Lук определяем по формуле:
Lук=Н+30=1079+30=1109 м, (1.40)
где 30 - ориентировочная длина каната на образование петли в зумпфе ствола и закрепление каната к подъемным сосудам, м.
1.8.4. Массу mп всех движущихся частей подъемной установки приведенную к окружности шкива трения, определим по формуле:
mп=Qп+2Qc+LпкР+Lукq+m¢ош+m¢м+m¢д=
=25×103+2×24,4×103+1157×4×8,4+1109×3´11,5+25,5×103+2039+9786=
=188´103кг, (1.41)
где Qп и Qc - масса полезного груза и масса скипа, кг;
P и q - линейная масса подъемного и уравновешивающего канатов, кг;
Lпк и Lук - длина подъемных и уравновешивающих канатов, кг;
m¢ош, m¢м, m¢д - масса отклоняющего шкива, машины и якоря двигателя, кг.
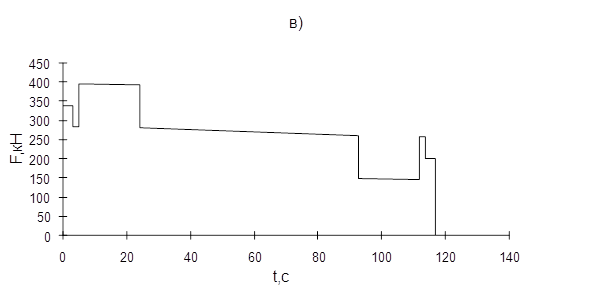
1.8.5. Движущие усилия F получаем из основного динамического уравнения академика М.М. Федорова (таблица1.1):
F=[1,1Qп+(Н-2hx)×(q-P)]g±mпа=
=[1,1×25×103+(1079-2×hx)(3×11,5-4×8,4)]9,81±188×103а=
=283×103-23,5×hx±188×103a. (1.42)
1.8.6. Эквивалентное усилие Fэк рассчитываем по формуле:
Fэк= , (1.43)
, (1.43)
где Т¢п=куд(t¢+t¢1+t1+t3+t²+t²1)+t2+kпtп=0,5(3×2+2×2+19×2)+69+0,25×11=96 с;
куд=0,5, кп=0,25 - коэффициенты, учитывающие ухудшение условий охлаждения во время соответственно ускоренного и замедленного движения;
F и t - усилие и продолжительность элементарного участка на диаграмме усилий.
![]() =(3394002+3393812)
=(3394002+3393812)![]() +(2829812+282981×282943+2829432)
+(2829812+282981×282943+2829432)![]() +
+
+(3957442+3928742)![]() +(2800742+280074×260552+2605522)
+(2800742+280074×260552+2605522)![]() +
+
+(1477522+1448832)![]() +(2576832+257683×257254+2572542)
+(2576832+257683×257254+2572542)![]() +
+
+(2012542+2012212)![]() =9,158×103Н;
(1.44)
=9,158×103Н;
(1.44)
![]() =308862Н.
=308862Н.
Таблица 1.1
| h,м | а,м/с2 | F,Н | |
| 1 | 0 | 0,3 | 339400 |
| 2 | 0,8 | 0,3 | 339381,184 |
| 3 | 0,8 | 0 | 282981,184 |
| 4 | 2,4 | 0 | 282943,552 |
| 5 | 2,4 | 0,6 | 395743,552 |
| 6 | 124,4 | 0,6 | 392874,112 |
| 7 | 124,4 | 0 | 280074,112 |
| 8 | 954,4 | 0 | 260552,512 |
| 9 | 954,4 | 0,6 | 147752,512 |
| 10 | 1076,4 | 0,6 | 144883,072 |
| 11 | 1076,4 | 0 | 257683,072 |
| 12 | 1077,6 | 0 | 257654,848 |
| 13 | 1077,6 | 0,3 | 201254,848 |
| 14 | 1079 | 0,3 | 201221,92 |
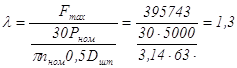
1.8.7. Коэффициент перегрузки при подъеме:
![]() (1.45)
(1.45)
где Fmax-максимальное движущее усилие при подъеме груза, Н.
1.8.8. Номинальную мощность двигателя Рд выбираем из условия:
![]() (1.46)
(1.46)
Диаграммы движущих усилий приведены на рис.1.1.
Окончательно примем двигатель П2-800-255-8КУ4 номинальной мощностью Рном=5000 кВт, частотой вращения nном=63 об/мин, так как разность между эквивалентной мощностью и номинальной превышает 5%, т.е. [1]:
![]()
а перегрузка в период разгона составит:
 < lдв= , (1.47)
< lдв= , (1.47)
где lдв - перегрузочная способность выбранного двигателя.
Похожие работы
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... 284 Объектом курсового проектирования является двухскиповая подъемная установка главного ствола. Целью курсового проектирования является автоматизация подъемной скиповой установки с асинхронным приводом. 1.1. Общие требования к аппаратуре ...
... ; защита отходящих линий - от утечки тока на землю, от короткого замыкания. 1.7 Поверхностный комплекс рудника В поверхностный комплекс рудника входят: склад взрывчатых материалов, компрессорная, котельная, здания подъемных машин шахт "Тишинская", "Ульбинская", "Западная", "Вентиляционная", надшахтные здания "Тишинская" и "Ульбинская", здания вентиляционных установок "Западная", "Ульбинская ...
... (от передвижения источников загрязнения) 1180,48 Всего за год: 211845,25 10. Совершенствование системы электроснабжения подземных потребителей шахты Расчет схемы электроснабжения ЦПП до участка и выбор фазокомпенсирующих устройств Основными задачами эксплуатации современных систем электроснабжения горных предприятий являются правильное определение электриче ...
0 комментариев