Навигация
Суммарная индуктивность цепи выпрямленного тока
38433
знака
2
таблицы
9
изображений
2.4.5. Суммарная индуктивность цепи выпрямленного тока.
![]() (2.14)
(2.14)
где 2pf – угловая частота питающей сети;
2.4.6. Индуктивность активной части трансформатора.
![]() (2.15)
(2.15)
где ек - напряжение короткого замыкания, отн.ед.;
U2 ном - фазное напряжение вентильной обмотки, В;
I2 ном - ток вентильной обмотки, А;
f - частота питающей сети,Гц.
2.4.7. Индуктивность якоря двигателя Lд определяем по формуле Лиумвиля-Уманского:
 (2.16)
(2.16)
где с1=0,1 - коэффициент для компенсированных электродвигателей;
2р=16 - число пар полюсов;
nном - номинальная частота вращения двигателя, об/мин;
Uном - номинальное напряжение двигателя, В;
Iном - номинальный ток двигателя, А.
2.4.8. Индуктивность сглаживающего реактора определяем по формуле [4]:
![]() (2.17)
(2.17)
где Uном - номинальное напряжение двигателя, В;
Iном - номинальный ток двигателя, А.
Применим реактор типа СРОС3-3200МУХЛ4 на номинальный ток
3200А и с индуктивностью 0,5 мГн [2].
2.5. Расчет автоматического выключателя в якорной цепи2.5.1. Коэффициент пропорциональности между движущим усилием и током якоря двигателя кf определим по формуле:
![]() (2.18)
(2.18)
где Мном – номинальный момент двигателя, Н×м;
Rшт – радиус шкива трения, м;
Iном – номинальный ток двигателя, А.
2.5.2. Максимальный ток двигателя Imax рассчитаем по формуле:
![]() (2.19)
(2.19)
2.5.3. Ток уставки Iуст срабатывания реле максимальной защиты определим по формуле:
Iуст=кнImax=1,1×7329=8062 А, (2.20)
где кн=1,1 - коэффициент надежности [2].
Применим автоматический выключатель ВАТ-42-1000/10-Л-У4 с реле защиты РДШ-6000 и диапазоном тока уставки
6000¸12000 А [1].
2.6.Выбор тиристорного возбудителя2.6.1. Индуктивность обмотки возбуждения двигателя определим по формуле:

 (2.21)
(2.21)
где L - индуктивность, обусловленная полезным потоком, Гн;
Lр - индуктивность от полей рассеивания, Гн;
2р - число пар полюсов;
Wв=84 - число витков на полюс;
sном=1,1 - коэффициент рассеивания при номинальном потоке [2];
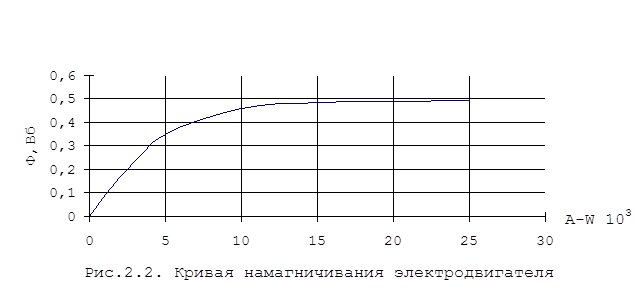
DФ - изменение потока, вызванное соответствующим изменением ампер-витков (DIвWв), Вб (рис.2.2.).
2.6.2. Постоянную времени цепи возбуждения Тв определим по формуле:
![]() (2.22)
(2.22)
где Lов - индуктивность обмотки возбуждения, Гн;
Rов - сопротивление обмотки возбуждения, Ом.
2.6.3. Время рывка tр при высоте подъема Н=1079 м согласно графику [2]:
tр=2с. (2.23)
2.6.4. Требуемое значение коэффициента форсировки кф определим по формуле:
 (2.24)
(2.24)
![]() (2.25)
(2.25)
где Тв - постоянная времени возбуждения, с.
2.6.5. Максимальное значение выпрямленного напряжения Umax определим по формуле:
Udmax=КфUв ном=3,06×145=443,7 В, (2.26)
где Uв ном - номинальное напряжение возбуждения при параллельном соединении полуобмоток возбуждения, В.
Применим тиристорный возбудитель ТПР9-320/460Р-31У4 с номинальным током 320 А и номинальным напряжением 460 В [2].
2.6.6. Передаточный коэффициент ктв тиристорного возбудителя определим по формуле:
Ктв=Ud ном/Uвх тв=460/8=57,5, (2.27)
где Ud ном - номинальное выпрямленное напряжение, В;
Uвх тв=8 В - выходное напряжение управления.
2.7. Выбор тахогенератора в цепи ОС по скоростиПрименяем тахогенератор типа ПТ-42 с номинальной частотой вращения nтг ном=100 об/мин и номинальным напряжением Uтг ном=230В [2].
2.7.1. Максимальное напряжение на выходе тахогенератора Uтг max определим по формуле:
Uтг=Uтг ном(nдв ном/nтг ном)=230(63/100)=145, (2.28)
где Uтг ном - номинальное напряжение тахогенератора, В;
nдв ном - номинальная частота вращения двигателя, об/мин;
nтг ном - номинальная частота вращения тахогенератора, об/мин.
2.7.2. Передаточный коэффициент ктг рассчитаем по формуле:
ктг=Uтг max/nдв ном=145/63=2,3 В/(об/мин). (2.29)
3. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ
На основе технических решений принятых на первом [1] и втором [2] этапах проектирования, выбирают регуляторы тока, скорости и другие технические средства, составляющие систему автоматического управления электроприводом.
Таблица 3.1.
| Наименование величин. | Обозначение. |
| Подъёмная машина | |
| Суммарный маховый момент | SGD2=9150 кг×м2 |
| Нормальное ускорение и замедление | а 1 = а 3 =0,6 м/с2 |
| Максимальная скорость | v max=16 м/с |
| Диаметр шкива трения | D шт =5 м |
| Двигатель | |
| Номинальный момент | М ном = 774 кНм |
| Номинальная частота вращения | n ном = 63 об/мин |
| Суммарное сопротивление якорной цепи | R я = 0,00348 Ом |
| Суммарная индуктивность якорной цепи | L я = 0,08 мГн |
| Индуктивность сглаживающего дросселя | L р = 0,5 мГн |
| Номинальный ток | I я ном = 5740 А |
| Эффективный ток | I эф = 4906 А |
| Максимальный ток | I я max = 7610 А |
| Номинальное напряжение | Uном = 930 В |
| Номинальная мощность | P ном = 5000 кВт |
| Число полюсов обмотки якоря | 2р = 16 |
| Число параллельных ветвей обмотки якоря | 2а = 16 |
| Число активных проводников обмотки якоря | N = |
| Номинальный магнитный поток | Ф ном = 37,5 Вб |
| Номинальное напряжение возбуждения | U в.ном = 200 В |
| Номинальный ток возбуждения | I в.ном = 145 А |
| Сопротивление обмотки возбуждения | r в = 0,87 Ом |
| Индуктивность обмотки возбуждения | L в = 3,1 Гн |
| Передаточный коэффициент тахогенератора | К тг = 2,3 В/об/мин |
| Постоянная времени обмотки возбуждения | Т в = 3,06 с |
| Номинальный ток шунта | Iш = 200 А |
| Тиристорный преобразователь | |
| Постоянная времени | Т м = 0,02 с |
| Максимальное выпрямленное напряжение | U d max = 660 В |
| Коэффициент передачи | К тп = 82,5 |
| Тиристорный возбудитель | |
| Постоянная времени | Т вм = 0,02 с |
| Максимальное выпрямленное напряжение | U d max = 1050 В |
| Коэффициент передачи | К тв = 131,25 |
| Коэффициент форсировки | К ф = 3,06 |
| Система электропривода | |
| Коэффициент пропорциональности между эдс и скоростью | К v = 55 В/(м/с) |
| Коэффициент пропорциональности между усилием и током якоря | К F = 52 Н/А |
| Суммарная приведенная масса | m п = 188×103 кг |
3.1. Расчет системы подчиненного регулирования координат электропривода
Рассчитаем параметры САУ на основе элементов УБСР-АИ, входящих в состав комплектного электропривода КТЭУ.
Система построена по принципу подчиненного регулирования с зависимым регулированием тока возбуждения от тока якорной цепи при значениях тока якорной цепи менее 0,5Iдв ном .
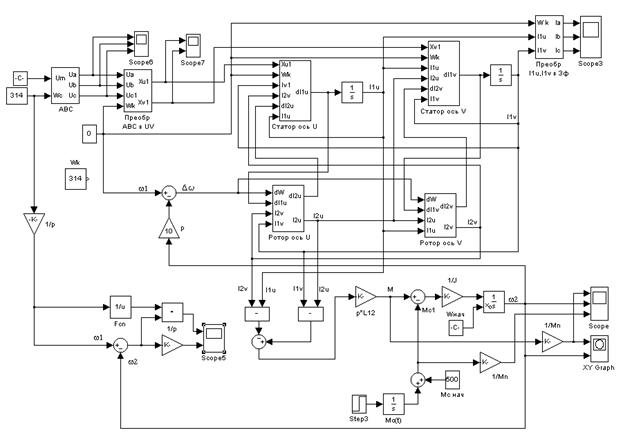
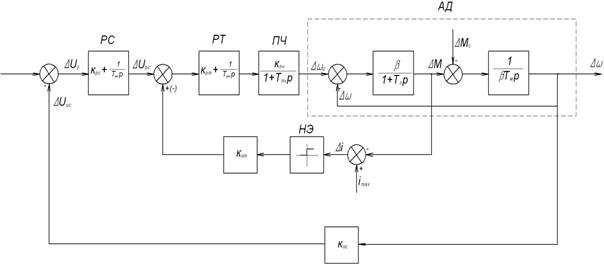
Расчет конкретных параметров САУ произведем, используя структурную схему, построенную по математическому описанию электромеханических процессов в абсолютных единицах.[3]
При расчете принимаем следующие допущения:
- механическая система представляется в виде одномассовой системы;
- демпфирующее действие вихревых токов в шихтованной станине электродвигателя не учитывается.
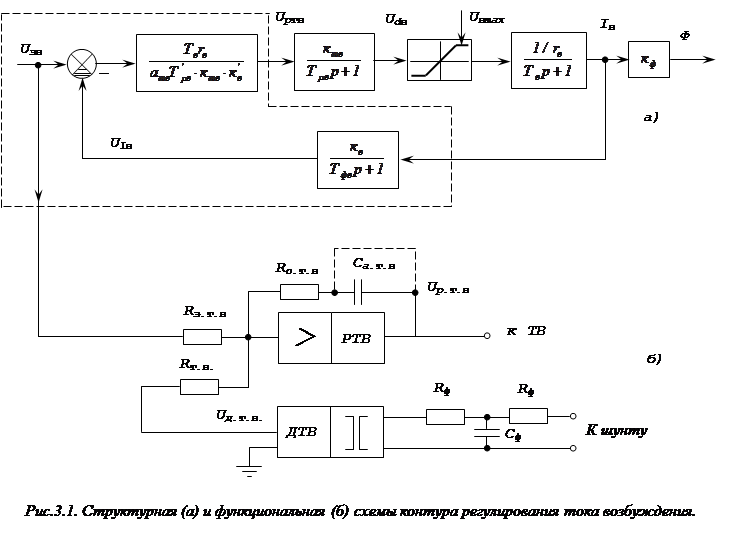
3.2.Расчет контура регулирования тока возбуждения
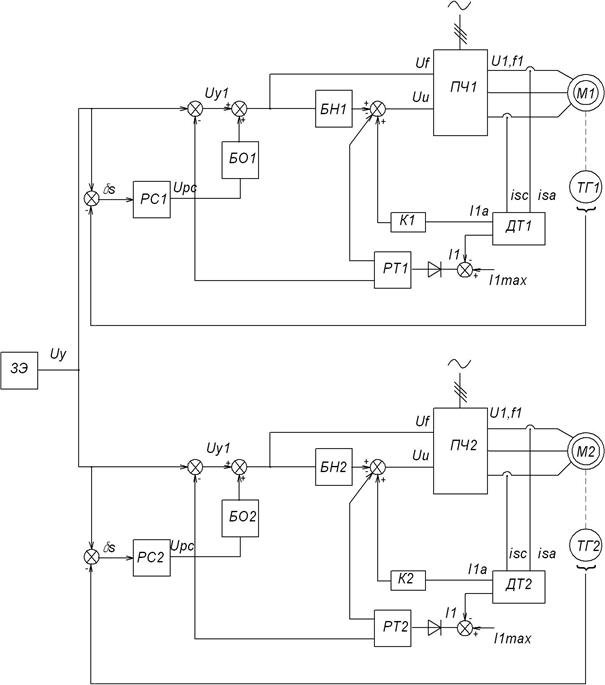
Структурная и функциональная схемы контура регулирования тока возбуждения представлены на рис.3.1.
3.2.l. Постоянная времени фильтра Тфв рассчитывается по формуле:
![]() (3.1)
(3.1)
где к=5¸6 - коэффициент, учитывающий уменьшение уровня пульсаций [3];
m=6 - пульсация сигнала за период для мостовой схемы;
f=50 Гц - частота питающей сети.
3.2.2. Постоянная времени контура тока возбуждения Т¢m в:
Т¢mв=Тmв+Тфв=0,02+0,0025=0,0225 с, (3.2)
где Тm в - постоянная времени тиристорного возбудителя, с;
Тфв - постоянная времени фильтра, с.
3.2.3. Параметры фильтра (Rф ,Сф ):
Сф=Тфв/Rф=0,0025/100=25×10-6 Ф, (3.3)
где Rф=10¸100 Ом - сопротивление фильтра;
Сф - емкость фильтра.
3.2.4. Передаточный коэффициент цепи обратной связи Кв:
![]() (3.4)
(3.4)
где Rзтв и Rтв - входные сопротивления регулятора (Rзтв=Rтв);
Uдтв=10В - напряжение выхода датчика тока при номинальном токе Iв ном .
 3.2.5. Статическую ошибку DIв для пропорционального регулятора определим по формуле:
3.2.5. Статическую ошибку DIв для пропорционального регулятора определим по формуле:
 (3.5)
(3.5)
где Iв ном - номинальный ток возбуждения, А;
Тв - постоянная времени обмотки возбуждения, с;
атв=2 - коэффициент настройки контура, принимаемый по условию модульного оптимума [3];
Т¢mв - постоянная времени контура тока возбуждения, с.
Решение: Реализовать условие Uдв=Uдтв и выбрать значение входных сопротивление регулятора тока возбуждения:
Rзтв=Rтв=10 кОм
3.2.6. Требуемый коэффициент датчика тока Кдтв определим по формуле:
![]() (3.6)
(3.6)
где Iш ном - номинальный ток шунта, А;
Iв ном - номинальный ток возбуждения, А;
Кв - передаточный коэффициент цепи обратной связи;
Кшв=Uш ном /Iш ном - коэффициент шунта.
Предварительно применим ячейку датчика тока типа ДТ-3АИ(УБСР-АИ), коэффициент передачи которого регулируется в пределах 53,3¸133,3. Для уменьшения требуемого коэффициента датчика тока применить два шунта типа 75ШСМ 200А, соединенных параллельно друг другу [3].
3.2.7. Сопротивление обратной связи регулятора тока возбуждения Rотв вычислим по формуле:
![]() (3.7)
(3.7)
где Rзтв - входное сопротивление регулятора тока возбуждения, Ом;
Тв - постоянная времени обмотки возбуждения, с;
rв - сопротивление обмотки возбуждения, Ом;
атв - коэффициент настройки контура на модульный оптимум;
Т¢mв - постоянная времени контура тока возбуждения, с;
Ктв - передаточный коэффициент тиристорного возбудителя;
Кв - передаточный коэффициент обратной связи.
3.2.8. Установившиеся уровни выходного напряжения регулятора тока возбуждения для номинального и форсированного режимов Uртв ном Uртв ф рассчитаем по формулам:
![]()
![]() (3.8)
(3.8)
где Uв ном - номинальное напряжение обмотки возбуждения, В;
Ктв - передаточный коэффициент обмотки возбуждения;
Кф - коэффициент форсировки.
Окончательно выберем ячейку датчика тока ДТ-3АИ (УБСР-АИ).
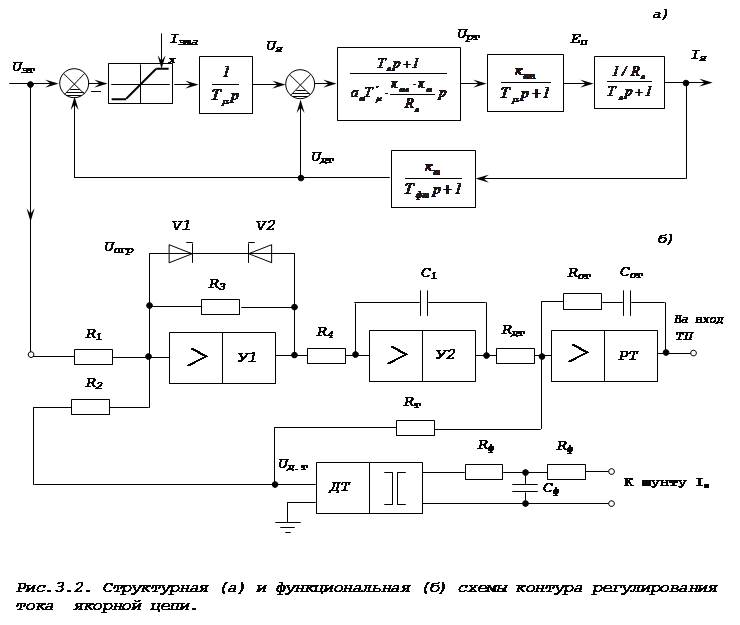
3.3. Расчет контура регулирования тока якорной цепиСтруктурная и функциональная схемы контура регулирования тока якорной цепи представлена на рис.3.2.
3.3.1. Постоянную времени фильтра Тфт на входе датчика тока рассчитываем по формуле:
![]() (3.9)
(3.9)
где к=5¸6 - коэффициент, учитывающий уменьшение уровня пульсаций [3]
m=12 - пульсация сигнала за период для двойной трехфазной мостовой схемы;
f=50Гц - частота питающей сети.
3.3.2. Емкость Т-образного фильтра рассчитаем по формуле:
Сф=Тфт/Rф=0,00125/100=12,5 мкФ, (3.10)
где Rф - сопротивление, принимаемое в пределах 10¸100 Ом.
3.3.3. Эквивалентную не компенсируемую постоянную времени контура тока вычислим по формуле:
Т¢mт=Тmт+Тфт=0,02+0,00125=0,02125 с, (3.11)
где Тmт=0,02с - постоянная времени тиристорного преобразователя.
Решение: примем согласованное управление током якоря Iя и током возбуждения Iв в функции напряжения на выходе регулятора скорости Uрс.
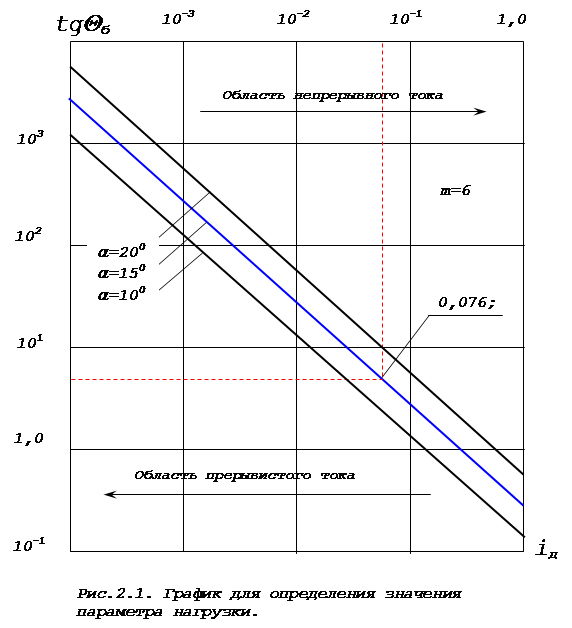
Применим условие начала реверсирования Iв/Iя=0,5I, т.е. уровень тока якоря, с которого начинается изменение тока возбуждения, составляет
iя рев=0,5.
3.3.4. Допустимое значение скорости изменения тока якоря рассчитывается по формуле:
 (3.12)
(3.12)
где Кп=2 - коэффициент, учитывающий перегрузку по току якоря [3];
Тв - постоянная времени обмотки возбуждения двигателя, с;
Кф - коэффициент форсировки;
iя рев - относительное значение тока якоря, при котором начинается изменение тока возбуждения (реверс).
3.3.5. Максимальное значение параметра настройки регулятора тока ат определяется из условия:
 (3.13)
(3.13)
Решение: Параметр настройки регулятора тока принять по условию модульного оптимума, т.е. ат=2.
3.3.6. Передаточный коэффициент обратной связи контура тока определяются по формуле:
![]() (3.14)
(3.14)
где Rзт иRт - входные сопротивления регулятора тока, отношение которых принимается равным единице;
Uдт max - не должно превышать 15 В (напряжение питания УБСР-АИ)
3.3.7. Коэффициент шунта определяется по паспортным данным:
Кш=Uш ном /Iш ном=0,075/10000=75×10-6 В/А, (3.15)
где Uш ном=75 мВ для шунта 75 ШСМ [3];
Iш ном - номинальный ток шунта.
3.3.8. Коэффициент датчика тока определяется по формуле:
![]() (3.16)
(3.16)
3.3.9. Параметры регулятора тока вычисляем по формуле:
 (3.17)
(3.17)
Rот=Тя/Сот=0,08×10-3/(2×10-6×0,01438)=2,78 кОм,
где Тит - постоянная времени интегральной части ПИ-регулятора, с;
Сот=2¸3мкФ - емкость обратной связи регулятора токам [3];
Тя=Lя/Rя - постоянная времени якорной цепи, с;
Ктп, Rя, Lz - заданные величины.
3.3.10. Постоянная времени интегратора:
 (3.18)
(3.18)
где iя max=Iя max/Iя ном=7610/5740=1,33.
3.3.11. Коэффициент усиления нелинейного элемента в линейной зоне:
![]() (3.19)
(3.19)
3.3.12. Сопротивление обратной связи R3 при R1=10 кОм:
R3=R1×Кнэ=10Кнэ=10×35,3=353 Ом. (3.20)
3.3.13. Входное сопротивление R4 для усилителя У2 при С1=3 мкФ:
R4=Тип/С1=3/(3×10-6)=100 кОм. (3.21)
3.3.14. Напряжение ограничения усилителя У1:
![]() (3.22)
(3.22)
3.3.15. Входное сопротивление R2 для усилителя У1:
R2=R1=10 кОм. (3.23)
3.4. Расчет контура регулирования скорости3.4.1. Максимальное значение приращения движущего усилия DFст max определяют из условия:
DFст max£0,1F1=0,1×339400=33,94 кН, (3.24)
где F1 - движущее усилие, равное статическому в начальный момент времени, Н.
Решение: Примем максимальное значение движущего усилия, при котором в замкнутой системе регулирования скорость не должна изменится более, чем на 1%:
DVmax=0,01×16=0,16 м/с. (3.25)
3.4.2. Абсолютное значение статической ошибки в замкнутой системе управления DVа определим по формуле:
![]() (3.26)
(3.26)
где ас=2 - параметр настройки регулятора скорости [3];
Тmс=а2т(Тm+Тфт)+Тфс=4(0,02+0,0125)+0,02=0,15 с - эквивалентная не компенсируемая постоянная времени контура скорости, с;
ат=2 - параметр настройки регулятора тока [3];
Тm=0,02с - постоянная времени тиристорного преобразователя [3];
Тфт - постоянная времени фильтра на входе датчика тока, с;
![]() - постоянная времени фильтра на входе датчика скорости, с;
- постоянная времени фильтра на входе датчика скорости, с;
К=3 - кратность уменьшения пульсации напряжения тахогенератора [3];
![]() - частота полюсных пульсаций тахогенератора, Гц;
- частота полюсных пульсаций тахогенератора, Гц;
КК, КV - заданные величины;
Тм - электромеханическая постоянная времени электропривода, с; m, RS - ранее рассчитанные величины.
3.4.3. Относительное значение статической ошибки при установившемся режиме в замкнутой системе определим по формуле:
DV%=(DVa/Vmax)100%=(0,054/16)100=0,34<1%. (3.27)
3.4.4. Время регулирования определили по формуле:
![]() (3.28)
(3.28)
где d=0,03 - допустимая динамическая ошибка по скорости [3];
Vmax - максимальная скорость движения подъемных сосудов, м/с;
аmax - максимальное ускорение в период разгона и замедления, м/с2.
3.4.4. Масштаб времени Z определили по формуле:
Z=tрег/tнор=3/6=0,5 с, (3.29)
где tнор=6 с - нормированное время переходного процесса [3].
Принимаем график переходного процесса для параметров Z=0,5, Qт=0,15 [5].
3.4.5. Параметры настройки двухкратноинтегрирующего контура скорости определяем из условия равенства выражений:
всас2ат2Qm2=2,5Z2; всасатQm=2,5Z. (3.30)
Отсюда вс=2,5; ас=Z/(атQm)=0,5/(2´0,15)=1,7. (3.31)
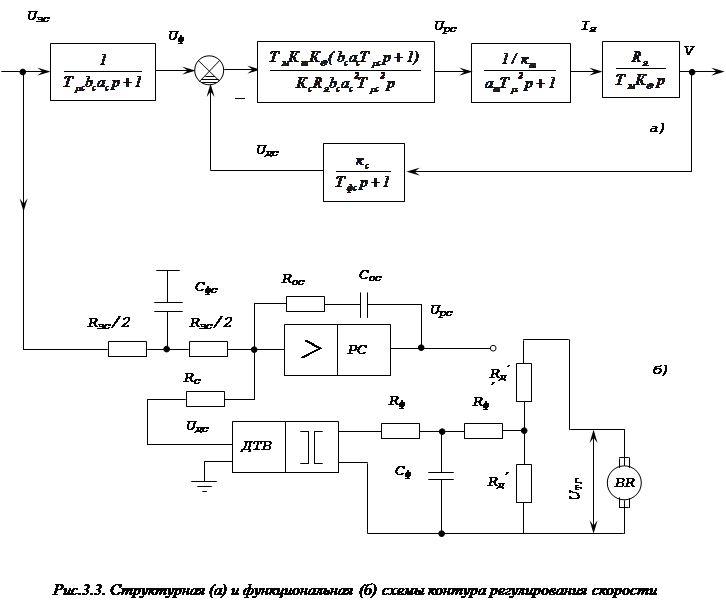
Решение: Приняли структурную и функциональную схемы контура регулирования скорости (рис.3.3)
3.4.6. Коэффициент обратной связи по скорости рассчитали по формуле:
![]() (3.32)
(3.32)
где Rзс=Rс;
Uдс - напряжение, В, снимаемое с датчика скорости при скорости подъема Vmax, м/с.
Используем ячейку датчика напряжения ДН-2АИ (УБСР-АИ), и присоединим его вход к выходу тахогенератора с помощью делителя напряжения Rд¢ и Rд². Принять |Uдс|=|Vmax| [3].
3.4.7. Напряжение, снимаемое с тахогенератора, определили по формуле:
![]() (3.33)
(3.33)
где Uтг ном - номинальное напряжение тахогенератора, В;
nтг ном - номинальная частота вращения тахогенератора, об/мин;
nдв ном - номинальная частота вращения двигателя, об/мин.
3.4.8. Полное сопротивление делителя напряжения определим по формуле:
Rд=Uтг/Iтг ном=149,5/0,1=1,5 кОм, (3.34)
где Iтг ном - номинальный ток тахогенератора, А.
3.4.9. Мощность резисторов:
Pд=UтгIтг ном=149,5´0,1=14,95 Вт. (3.35)
![]() (3.36)
(3.36)
Условие согласования: Rд¢£![]() =2400/10=240 Ом, (3.37)
=2400/10=240 Ом, (3.37)
где Rвх д=2,4кОм - входное сопротивление датчика ДН-2АИ(УБСР-АИ)
Передаточная функция ПИ-регулятора скорости имеет вид:
 (3.38)
(3.38)
3.4.10. Параметры ПИ-регулятора скорости:
![]()
![]() (3.39)
(3.39)
Условие жесткости подъемных канатов:
так как Кпс³10 необходимо принять демпфирующий коэффициент
![]() (3.40)
(3.40)
где Кпс=10 [3].
3.4.11. Постоянная времени интегральной части ПИ-регулятора скорости:
![]() (3.41)
(3.41)
Применим ячейку регулятора скорости РС-1АИ (УБСР-АИ).
3.4.12. Входные сопротивления регулятора скорости (Сос=2мкФ):
Rзс=Rс=Тис/Сос=0,03/(2×10-6)=15 кОм. (3.42)
3.4.13. Сопротивление обратной связи регулятора скорости:
Rос=RзсКпс=15000×21,4=321 кОм. (3.43)
3.4.14. Параметры фильтра на входе регулятора скорости:
Тф¢=всасТmс=2,5×1,7×0,15=0,64 с; (3.44)
Сфс=Тф¢/(0,5Rзс)=0,64/(0,5×15000)=0,85 мкФ. (3.45)
4. Список используемой литературы
1. Родченко А.Я., Евсеев Ю.В. Автоматизированный электропривод многоканатной подъемной установки. Ч.1. Механическая часть электропривода: Учеб.пособие /Норильский индустр. ин-т.– Норильск, 1996.-44с.
2. Писарев А.И., Родченко А.Я. Автоматизированный электропривод многоканатной подъемной установки. Ч.2. Система «управляемый выпрямитель – двигатель» с реверсом возбуждения двигателя. Силовые элементы электропривода: Учеб.пособие /Норильский индустр. ин-т.– Норильск, 1996.-48с.
3. Писарев А.И., Родченко А.Я. Автоматизированный электропривод многоканатной подъемной установки. Ч.3. Система «управляемый выпрямитель – двигатель» с реверсом возбуждения двигателя. Автоматическое управление электроприводом: Учеб.пособие /Норильский индустр. ин-т.– Норильск, 1996.-26с.
4. Комплектные тиристорные электроприводы:Справочник / И.Х.Евзеров, А.С.Горобец, Б.И.Мошкович и др.; Под ред. канд. техн.наук В.М.Перельмутера.- М.:Энергоатомиздат, 1988.-319с.:ил.
5. Католиков В.Е., Динкель А.Д., Седунин А.М. Тиристорный электропривод с реверсом возбуждения двигателя рудничного подъема.- М.:Недра, 1990.-382с.:ил.
6. Тиристорный электропривод рудничного подъема / А.Д.Динкель, В.Е.Католиков, В.И.Петренко, Л.М.Ковалев.-М.:Недра, 1977.-312с.:ил.
7. Александров К.К., Кузьмина Е.Г., Электротехнические чертежи и схемы.- М.:Энергоатомиздат, 1990.- 288с.:ил.
8. Католиков В.Е., Динкель А.Д., Седунин А.М. Автоматизированный электропривод подъемных установок глубоких шахт.- М.:Недра, 1983.-270с.:ил.
9. Малиновский А.К., Автоматизированный электропривод машин и установок шахт и рудников: Учебник для вузов.- М.:Недра,1987.- 277с.:ил.
10. Хаджиков Р.Н., Бутаков С.А., Горная механика:Учебник для техникумов.- 6-е изд., перераб. и доп.- М.:Недра, 1982.-407с.
Похожие работы
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... 284 Объектом курсового проектирования является двухскиповая подъемная установка главного ствола. Целью курсового проектирования является автоматизация подъемной скиповой установки с асинхронным приводом. 1.1. Общие требования к аппаратуре ...
... ; защита отходящих линий - от утечки тока на землю, от короткого замыкания. 1.7 Поверхностный комплекс рудника В поверхностный комплекс рудника входят: склад взрывчатых материалов, компрессорная, котельная, здания подъемных машин шахт "Тишинская", "Ульбинская", "Западная", "Вентиляционная", надшахтные здания "Тишинская" и "Ульбинская", здания вентиляционных установок "Западная", "Ульбинская ...
... (от передвижения источников загрязнения) 1180,48 Всего за год: 211845,25 10. Совершенствование системы электроснабжения подземных потребителей шахты Расчет схемы электроснабжения ЦПП до участка и выбор фазокомпенсирующих устройств Основными задачами эксплуатации современных систем электроснабжения горных предприятий являются правильное определение электриче ...
0 комментариев