Навигация
Расчет нагрузочных характеристик и выбор двигателя
19328
знаков
1
таблица
27
изображений
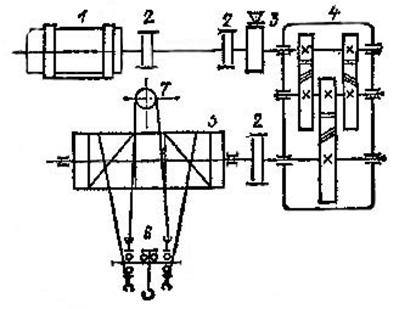
1.2 Расчет нагрузочных характеристик и выбор двигателя
Рассчитаем скорость дотягивания, при которой будет обеспечиваться нужная ошибка позиционирования 0,005 м
С запасам принимаем скорость дотягивания на 35% равной 0,05 м/с
![]()
Зададимся временем дотягивания Т=1с и линейным ускорением
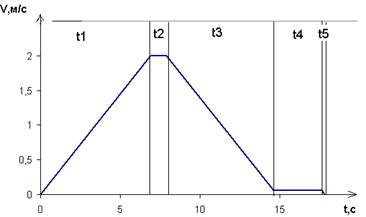
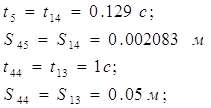
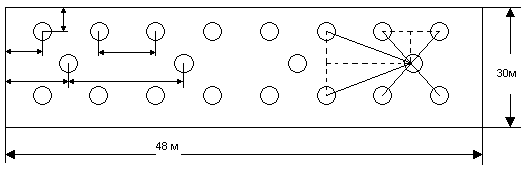
Определим параметры рабочего цикла при прохождении 1-ого участка без остановки (S=4 м):
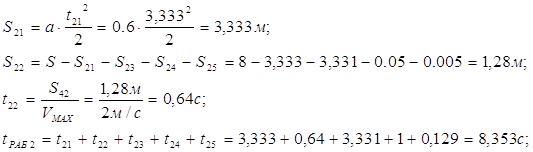
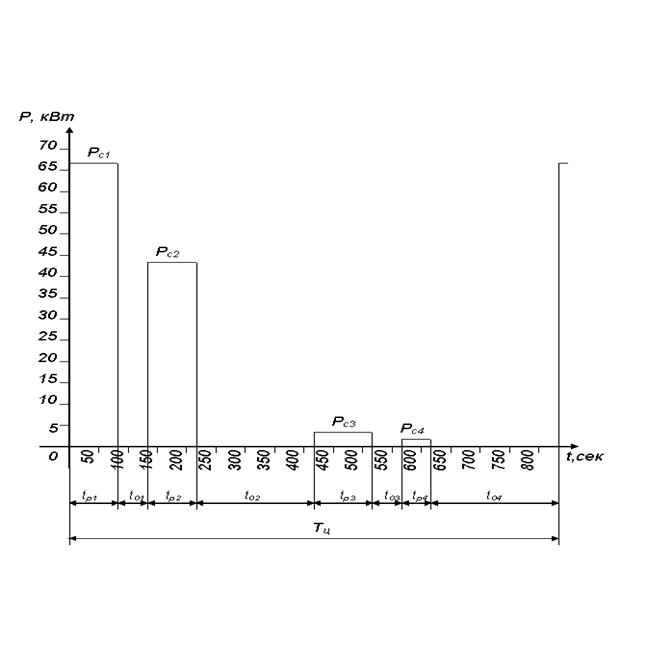
Характеристики рабочего цикла.
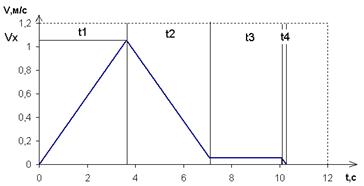
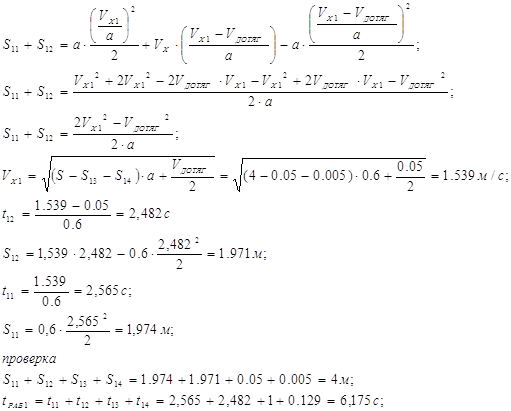
Рассчитаем параметры рабочего цикла
![]() ;
;
![]() ;
;
Выбираем время движения со скоростью дотягивания ![]() ;
;
![]() ;
;
выразим Vx1, до которой разгонится механизм
![]() ;
; ![]()
 ;
; ![]()
Далее произведем расчет для случаев когда механизм успевает выйти на максимальную скорость VMAX=2 м/с
При S2=8 м
 ;
;
![]()
![]() ;
;
![]()
Аналогично посчитаем параметры рабочего цикла при S3=12 м, S4 =16 м и S5=20 м
При S3=12 м
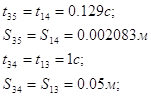 ;
;
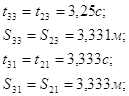 ;
;
 ;
;
При S4=16 м
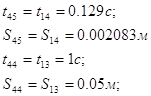 ;
;
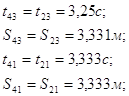 ;
;

При S5=20 м
 ;
;
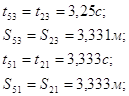 ;
;

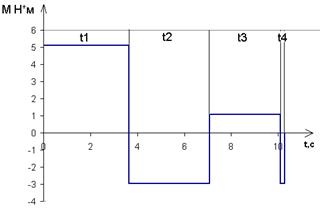
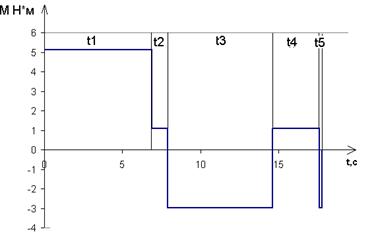
Выбор электродвигателя производится из условий эксплуатации и требований, предъявляемых к системе.
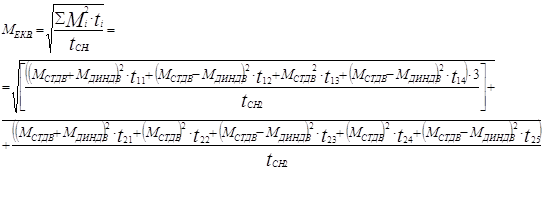
Так как в данном электроприводе нагрузка на валу двигателя меняется в достаточно широких пределах, произведём выбор электродвигателя по эквивалентному моменту.
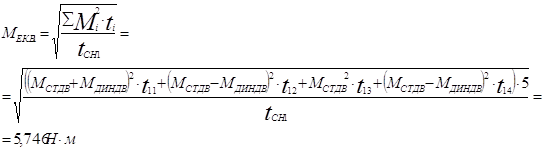
Для разных случаев посчитаем Мекв и выберем наихудший режим
принимая tОСТ=19с
1) Когда делаем 5 остановок (1+1+1+1+1)
![]()
Аналогично посчитаем Мекв для других случаев
2) Когда делаем 3 маленьких и одну большую остановку (1+1+1+2)
![]()
![]()
3) Когда делаем 2 маленьких и одну большую остановку (1+1+3)
![]()
![]()
4) Когда делаем 1 маленьких и одну большую остановку (1+4)
![]()
![]()
5) Делаем одну большую остановку (5)
![]()
![]()
6) Делаем одну маленькую и две больших (1+2+2)
![]()
![]()
7) делаем две остановки (3+2)
![]()
![]()
Максимальный эквивалентный момент будет при 7 случае.
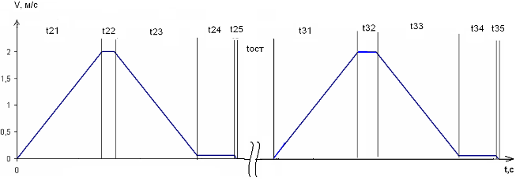
Рис. 7 случай
Выбираем более мощный двигатель с запасом по мощности
АИМ 80 В6
- номинальная мощность ![]()
- частота вращения ![]()
- номинальная величина скольжения ![]()
- номинальное напряжение сети ![]()
- коэффициент полезного действия ![]()
- коэффициент активной мощности ![]()
- перегрузочная способность ![]()
- кратность пускового момента ![]()
- кратность пускового тока ![]()
- момент инерции ротора: ![]()
– исполнение двигателя: IP44
– условие эксплуатации У5
Определим номинальный момент двигателя:
![]()
Т.к. номинальный момент нашего двигателя удовлетворяет условию Мном>Мэкв, то он нам подходит.
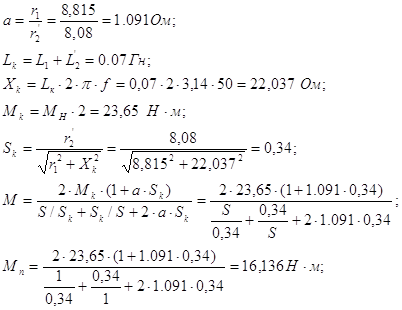
Произведем расчет статических характеристик электропривода и выполним проверку двигателя по нагреву.Выберем из таблицы аналогичный по высоте оси вращения и числу пар полюсов двигатель серии 4А и возьмем относительные значения его сопротивлений.
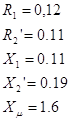
Пересчитаем параметры обмоток асинхронного двигателя из относительных единиц в абсолютные:
Электрическая мощность, забираемая из сети в номинальном режиме:
![]() (11)
(11)
Номинальный ток одной фазы:
![]() (12)
(12)
Полное сопротивление одной фазы:
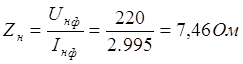 (13)
(13)
Умножим на Zн все параметры схемы замещения:
![]()
![]()
![]()
![]()
![]()
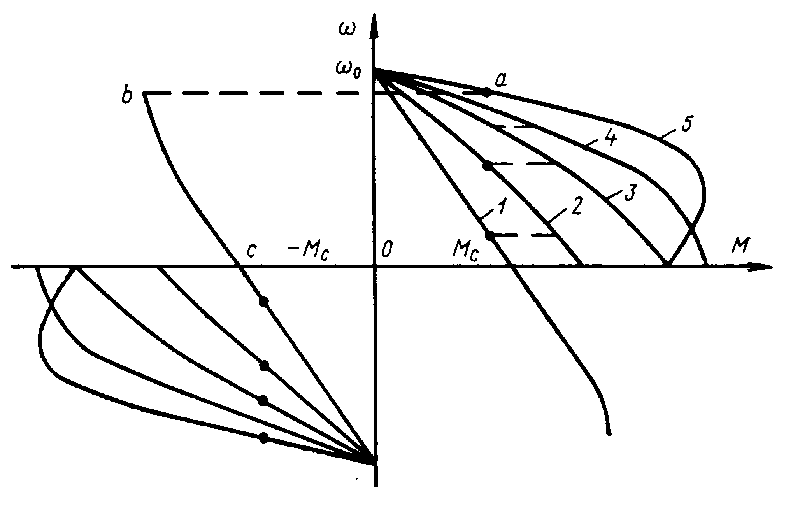
Для расчета статических механических характеристик воспользуемся уточненной формулой Клосса:
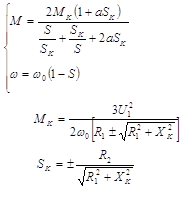
Закон управления будет заключаться в том, чтобы критический момент оставался постоянным Мк=23,65Н*м
Параметры рабочих режимов для случая 7 сведены в таблицу 1
Таблица 1
| i | 1 | 2 | 3 | 4 | 5 | 6 |
| ωдв, рад/с | 104,72 | 2,65 | 0 | 104,72 | 2,65 | 0 |
| Мс, Н·м | 3,28 | 3,28 | 3,28 | 3,28 | 3,28 | 3,28 |
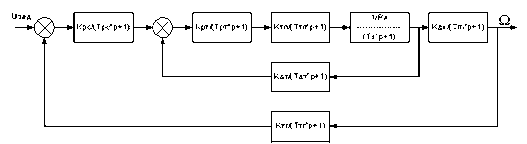
Будем считать, что для формирования необходимых нам статических характеристик система управления электроприводом реализует закон управления ![]() ,
,
При этом можно записать:

В установившемся режиме двигатель работает при скоростях ![]() и
и ![]() .
.
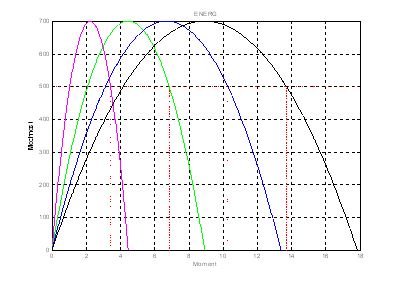
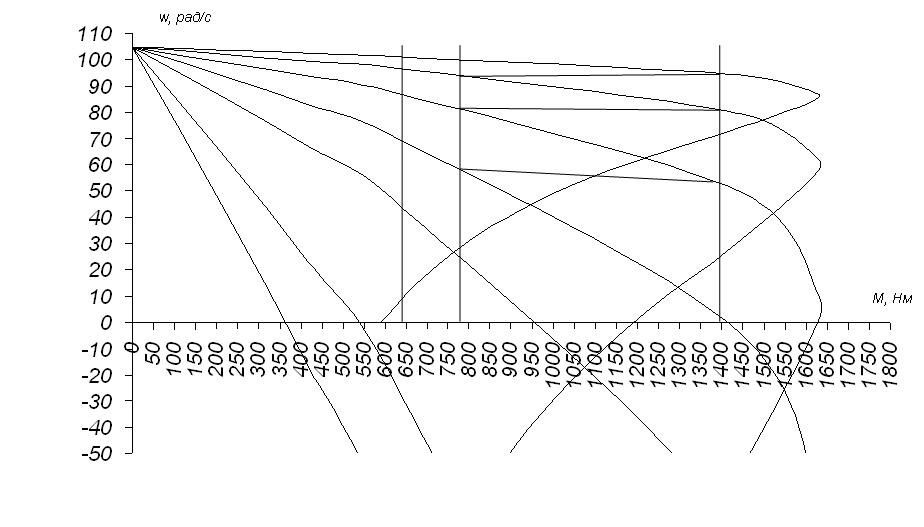
Рассчитаем механические характеристики на участках:
1) при w01=104,72 с-1
Напряжение на выходе преобразователя:

Частота тока на выходе преобразователя:
![]()
![]()
2) при w02=2,65 с-1
Напряжение на выходе преобразователя:

Частота тока на выходе преобразователя:
![]()
![]()
![]()

Пункты 3 и 4 будут аналогичны соответственно пунктам 1 и 2
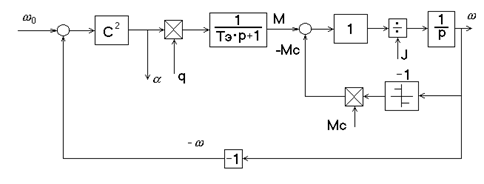
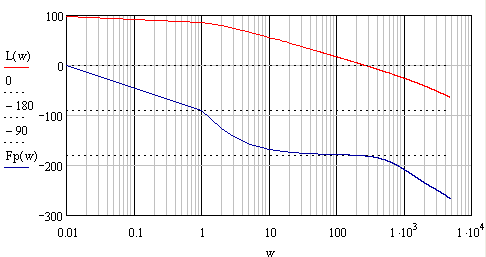
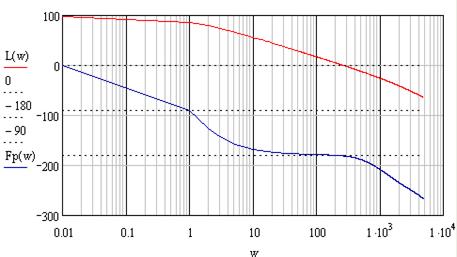
Расчёт переходных процессов в электроприводе.
Произведем линеаризацию характеристик на рабочем участке.
Так как при малом ускорении динамический момент мал, можно рассматривать переходный процесс как для двигателя постоянного тока с независимым возбуждением (с линейной характеристикой).
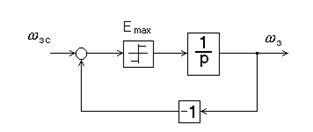
Ускорение обеспечивается при помощи задатчика интенсивности.
Рассчитаем данные для построения переходных процессов:
Проверка выбранного двигателя по нагреву
Тепловые процессы в двигателях в нормальных условиях, благодаря, большой тепловой инерции протекают замедленно, поэтому быстрые изменения нагрузки и, соответственно, тепловыделения фильтруются и зависимость превышения температуры τ(t) сглаживается тем в большей степени, чем меньше время цикла, в сравнении с постоянной времени нагрева Тн двигателя.
Для нашего электропривода условие tц =125,87с<<Tн=45 мин и, как выше было отмечено, через некоторое время после начала работы наступает установившийся тепловой режим, при котором превышение температуры колеблется относительно среднего значения τср в узких пределах.
Произведём проверку выбранного двигателя по нагреву, с использованием метода средних потерь, суть которого заключается в вычислении средних потерь двигателя за рабочий цикл и сравнения их с потерями двигателя при работе в номинальном режиме:
 (23)
(23)
Суммарные потери в асинхронном двигателе:
![]() ; (24)
; (24)
Постоянные потери в номинальном режиме:
![]() (25)
(25)
Номинальные потери двигателя определяются как:
 (26)
(26)
Переменные потери в номинальном режиме, с учетом намагничивающих потерь:
![]() (27)
(27)
где ![]()
При частотном способе регулирования скорости асинхронного двигателя постоянные потери определяются следующим выражением:
 (28)
(28)
Считая, что: ![]() , определим постоянные потери в двигателе для каждого интервала рабочего цикла:
, определим постоянные потери в двигателе для каждого интервала рабочего цикла:
![]()
![]()
![]()
![]()
Переменные потери:
![]()
Ток статора определяется по формуле:
![]() (1)
(1)
Приведенный ток ротора определяем по формуле:
 (2)
(2)
Определим токи ротора для каждого интервала рабочего цикла


![]()
![]()



![]()
Подставим уравнение (1) в (2), получим расчетную формулу для определения переменных потерь для каждого интервала рабочего цикла:
 (3)
(3)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Суммарные потери в асинхронном двигателе для каждого интервала рабочего цикла:
![]()
![]()
![]()
![]()
Средние потери двигателя за рабочий цикл равны:
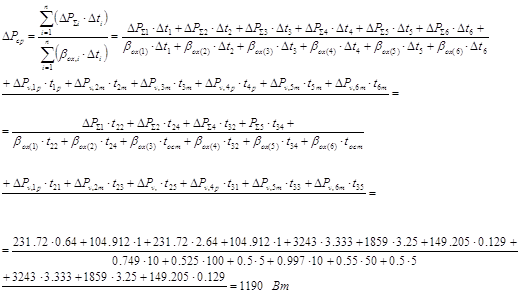 (4)
(4)

![]() коэффициент, учитывающий ухудшение вентиляции.
коэффициент, учитывающий ухудшение вентиляции.
![]() =0,5 – коэффициент ухудшения вентиляции при неподвижном роторе.
=0,5 – коэффициент ухудшения вентиляции при неподвижном роторе.
ti-время i-го интервала.
Сравним средние потери двигателя за рабочий цикл с потерями двигателя при работе в номинальном режиме:
![]() (33)
(33)
Таким образом, перегрузка двигателя составляет менее 10%. Следовательно, двигатель удовлетворяет требованиям по перегрузке.
Похожие работы
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... кран общего назначения грузоподъемностью 16/3,2 т. Поступательно перемещающиеся мостовые краны часто снабжают крюками, скобами либо специальными грузозахватными устройствами (магнитами, грейферами, механическими клещами). Мостовые краны снабжены тележками, предназначенными для подъема и перемещение груза вдоль пролета. Тележки могут перемещаться по рельсам, закрепленные на верхних или нижних ...

... в роторной цепи. Разгон в направлении «Вперед» и «Назад» производится в три ступени с помощью контакторов Кб, К7 и К8 Рисунок 1 - Механические характеристики электропривода механизма передвижения с магнитным контроллером K-63: 1-4 - соответствуют положениям командоконтроллера на подъем; 4а - промежуточная характеристика; На рис. 1 приведены механические характеристики указанной схемы. Для ...
... приемников электроэнергии, режимы их работы и размещении по территории цеха, номинальные токи и напряжения. Электромеханический цех (ЭМЦ) предназначен для подготовки заготовок из металла для электрических машин с последующей их обработкой различными способами. Он является одним из цехов металлургического завода, выплавляющего и обрабатывающего металл. ЭМЦ имеет станочное отделение, в котором ...
0 комментариев