Навигация
Выбор системы управления
19328
знаков
1
таблица
27
изображений
2. Выбор системы управления
2.1 Технико-экономическое обоснование
По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10.
Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. 15.2, с. 254):
- ТП-ДПТ: система тиристорный преобразователь – электродвигатель постоянного тока;
- КИ-АДФ: силовой контроллер с импульсно-ключевым регулированием скорости – асинхронный двигатель с фазным ротором;
- ПЧИ – АД: система преобразователь частоты инверторного типа – асинхронный двигатель с короткозамкнутым ротором;
С точки зрения удельной стоимости (для мощности 2…5кВт) все системы занимают равные положения, но сравнивая массогабаритные показатели и степень сложности исполнения системы, предпочтение получает система КИ – АДФ.
Выбор вида электропривода подтверждается на основе анализа экономических и массогабаритных показателей. Проанализируем две системы управления: КИ-АДФ и ТП-Д по методике, изложенной в [1] (т. 1, п.II.1., с. 231).Экономическая оценка производится по формуле:
А= ,
,
Где
А – показатель затрат, руб.;
P=2,7кВт – номинальная мощность электродвигателя;
Sk=![]() – число включений за год работы [1] (табл.II.1.3.);
– число включений за год работы [1] (табл.II.1.3.);
SДОП=![]() – для КИ-АДФ и SДОП=
– для КИ-АДФ и SДОП=![]() – для ТП-Д – износостойкость электропривода [1] (табл.II.1.2.);
– для ТП-Д – износостойкость электропривода [1] (табл.II.1.2.);
T=150 часов – в год [1] (табл.II.1.3.);
NВК=120 – число включений в час [1] (табл.II.1.3.);
g=2,5 – коэффициент, характеризующий приведенные моменты инерции механизмов.
b=1 для КИ – АДФ и b=0,4 для ТП-Д – коэффициент, определяющий потери при пуске, торможении и регулировании скорости.
СДВ – удельная стоимость 1 кВт мощности электродвигателя, руб./кВт
[1] (табл.II.1.4.);
СДВ КИ-АДФ=50 руб./кВт; СДВ ТП-Д=120 руб./кВт;
СУ – удельная стоимость управляющего устройства на 1кВт мощности двигателя, руб./кВт. [1] (табл.II.1.4.);
СУ КИ-АДФ=10 руб./кВт и СУ ТП-Д=250 руб./кВт.
АКИ-АДФ=![]() =162+108+16=286 руб.
=162+108+16=286 руб.
АТП-Д= =999+10+6,4=1015,4 руб.
=999+10+6,4=1015,4 руб.
Так как экономические показатели этих двух систем значительно различаются друг от друга, то массогабаритные показатели можно не сравнивать.
Затраты на систему КИ-АДФ меньше, поэтому ей и отдаем предпочтение.
2.2 Расчет параметром двигателя
Критическое скольжение:
![]() , где
, где ![]() -номинальное скольжение.
-номинальное скольжение.
![]() - синхронная частота вращения;
- синхронная частота вращения;
![]()
![]() - номинальная частота вращения;
- номинальная частота вращения;
![]()
Тогда:
![]()
MH-номинальный момент двигателя;
MH=![]()
Таким образом:
![]()
Отношения сопротивлений:
a=
 0.264
0.264
Сопротивление статора:

Приведенное сопротивление ротора:
![]() .
.
Индуктивное сопротивление короткого замыкания:
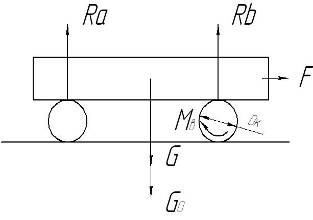
Проверка двигателя по пусковому моменту:
Для того чтобы двигатель разогнался, необходимо выполнение следующего условия:
Mп![]()
Mп=
49,5>(1,5…2)*18,9 – условие выполняется.
Похожие работы
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... кран общего назначения грузоподъемностью 16/3,2 т. Поступательно перемещающиеся мостовые краны часто снабжают крюками, скобами либо специальными грузозахватными устройствами (магнитами, грейферами, механическими клещами). Мостовые краны снабжены тележками, предназначенными для подъема и перемещение груза вдоль пролета. Тележки могут перемещаться по рельсам, закрепленные на верхних или нижних ...
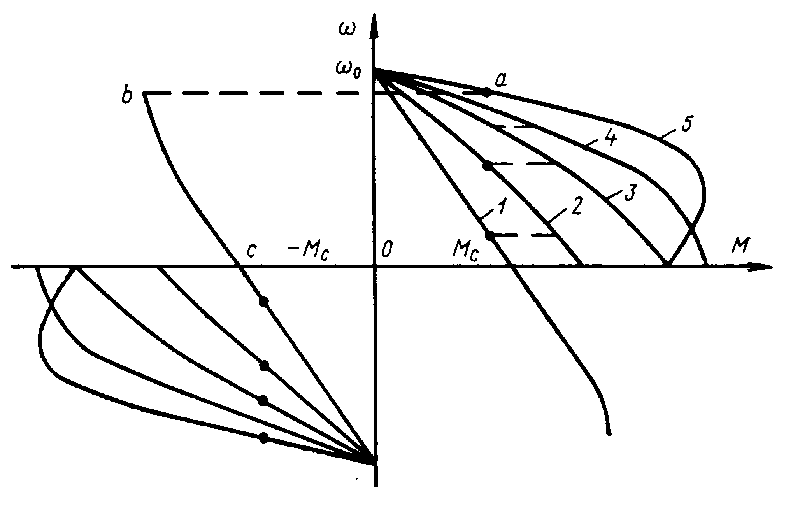

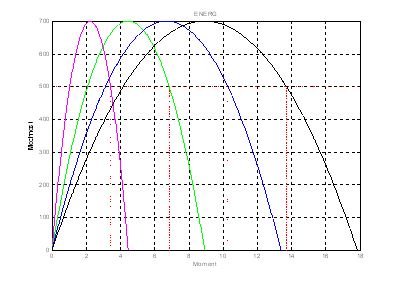
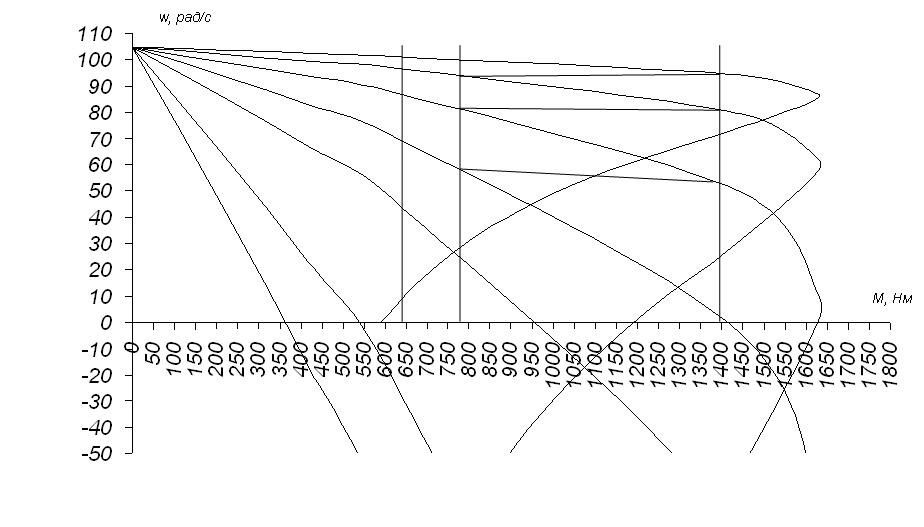
... в роторной цепи. Разгон в направлении «Вперед» и «Назад» производится в три ступени с помощью контакторов Кб, К7 и К8 Рисунок 1 - Механические характеристики электропривода механизма передвижения с магнитным контроллером K-63: 1-4 - соответствуют положениям командоконтроллера на подъем; 4а - промежуточная характеристика; На рис. 1 приведены механические характеристики указанной схемы. Для ...
... приемников электроэнергии, режимы их работы и размещении по территории цеха, номинальные токи и напряжения. Электромеханический цех (ЭМЦ) предназначен для подготовки заготовок из металла для электрических машин с последующей их обработкой различными способами. Он является одним из цехов металлургического завода, выплавляющего и обрабатывающего металл. ЭМЦ имеет станочное отделение, в котором ...
0 комментариев