Описание технологического процесса, как объекта управления
Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Каналов ввода/вывода
Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП
Функциональная структура системы управления ТП. Описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структурный и параметрический синтез регуляторов системы управления технологическим процессом
Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Навигация
Математическое моделирование системы управления технологическим процессом
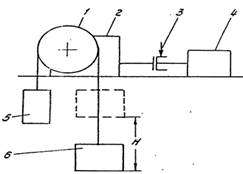
Автоматическая система управления процессом испытаний электропривода лифтов
63311
знаков
3
таблицы
31
изображение
3. Математическое моделирование системы управления технологическим процессом
3.1 Выбор среды моделирования и разработка математической модели технологического процесса и технологического оборудования с исполнительными электроприводами
Моделирование работы технологического процесса будем проводить в среде MATLAB Simulink, обладающей широкими возможностями выполнения математического моделирования, создавая модель из простых блоков. Также в среде Simulink содержаться блоки, которые позволяют визуализировать процессы моделирования.
Математическое описание процессов в асинхронном двигателе
Математическое описание АД должно отражать особенности эксплуатационных режимов работы нагрузочного моментного ЭП в составе испытательного стенда. Кроме того, в дальнейшем данная имитационная модель рассматривается как объект оптимального управления, на основании которого выполняется структурно-параметрический синтез системы векторного управления АД.
При составлении уравнений электрического равновесия в обмотках АД возьмём за основу систему уравнений для трёхфазной электрической машины и ряд допущений, общепринятых в теории электрических машин переменного тока:
параметры обмоток всех фаз имеют одинаковые значения, т.е. имеет место симметричный режим работы;
магнитное поле электрической машины имеет синусоидальное распределение вдоль воздушного зазора;
принимаем напряжения на выходе ПЧ синусоидальной формы, заведомо не учитывая взаимного влияния между АД и ПЧ по силовому каналу;
не учитываются потери в стали, вызываемые протеканием вихревых токов в магнитопроводе двигателя и его перемагничением;
насыщение магнитной цепи АД не учитывается благодаря наложению ограничений на статорные токи;
эффект вытеснения токов в проводниках ротора пренебрежимо мал ввиду того, что частота токов ротора при питании от ПЧ ограничена рабочим участком механической характеристики.
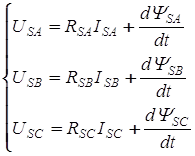
На основании второго закона Кирхгофа и с учётом вышеприведённых допущений, уравнения для ЭДС в обмотках статора и ротора АД можно представить в следующем виде:
 (2.1)
(2.1)
для цепей статора и
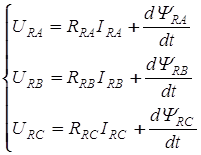 (2.2)
(2.2)
для цепей ротора.
В представленных системах уравнений приняты следующие обозначения:
![]() =
=![]() =
=![]() =
=![]() – активные сопротивления фаз статора;
– активные сопротивления фаз статора;
![]() =
=![]() =
=![]() =
=![]() – активные сопротивления фаз ротора;
– активные сопротивления фаз ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – мгновенные фазные напряжения статора и ротора;
– мгновенные фазные напряжения статора и ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – мгновенные фазные токи в обмотках статора и ротора;
– мгновенные фазные токи в обмотках статора и ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – потокосцепления обмоток статора и ротора.
– потокосцепления обмоток статора и ротора.
Для связи между потокосцеплениями и токами в обмотках воспользуемся законом Ампера, тогда:
 (2.3)
(2.3)
для статора
 (2.4)
(2.4)
для ротора.
Уравнения потокосцеплений показывают зависимость от токов в каждой обмотке через взаимоиндукцию. В уравнениях (2.3 и 2.4) коэффициенты ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() являются собственными индуктивностями соответствующих обмоток, все остальные – индуктивности между соответствующими обмотками.
являются собственными индуктивностями соответствующих обмоток, все остальные – индуктивности между соответствующими обмотками.
Не забывая о том, что системы уравнений (2.1 – 2.4) связывают исключительно скалярные величины, выражение для электромагнитного момента представим в следующем виде [60]:
 ,(2.5)
,(2.5)
где ![]() это число пар полюсов рассматриваемого АД.
это число пар полюсов рассматриваемого АД.
На основании второго закона Ньютона представим уравнение для движения и равновесия моментов на валу АД:
![]() ,(2.6)
,(2.6)
где ![]() – момент инерции на валу АД,
– момент инерции на валу АД, ![]() – угловая частота вращения ротора,
– угловая частота вращения ротора, ![]() – момент развиваемый АД и
– момент развиваемый АД и ![]() – момент приложенный к валу двигателя со стороны нагрузки.
– момент приложенный к валу двигателя со стороны нагрузки.
Изначально АД является трёхфазной электрической машиной с неявнополюсным ротором. Анализируя режимы работы АД в составе нагрузочного моментного ЭП и совокупность принятых выше допущений можно предположить правомерность использования для математического описания эквивалентной двухфазной модели.
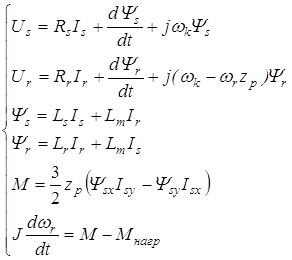
На пути упрощения математического описания АД оказался подходящим метод пространственного вектора, позволяющий существенно упростить и сократить вышеприведённую систему уравнений; метод позволяет связать уравнения (2.1 – 2.6) в единую систему с векторными переменными состояния. Суть метода состоит в том, что мгновенные значения симметричных трёхфазных переменных состояния (напряжение, токи, потокосцепления) можно математически преобразовать так, чтобы они были представлены одним пространственным вектором.
Представим систему уравнений с векторными переменными состояния для случая с произвольной ориентацией системы координат [21, 36]:
 (2.7)
(2.7)
Здесь ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() - двухэлементные векторы напряжений, токов и потокосцеплений, представленные в произвольно ориентированной ортогональной (двухфазной) системе координат в виде составляющих по координатным осям. Переменная
- двухэлементные векторы напряжений, токов и потокосцеплений, представленные в произвольно ориентированной ортогональной (двухфазной) системе координат в виде составляющих по координатным осям. Переменная ![]() служит для задания произвольной частоты вращения координатной системы. Вспомогательная матричная константа j служит для «переворота» компонентов векторных переменных и позволяет упростить форму записи системы уравнений.
служит для задания произвольной частоты вращения координатной системы. Вспомогательная матричная константа j служит для «переворота» компонентов векторных переменных и позволяет упростить форму записи системы уравнений.
Раскрывая содержание пространственных векторов, получаем следующее:
 ,
, ,
, ,
, ,
,
 ,
,  ,
,  .(2.8)
.(2.8)
Система координат с принудительной ориентацией по вектору потокосцепления ротора
При решении задач разработки систем управления для АД необходимо рассматривать его имитационную модель с позиций объекта оптимального управления.
В теории систем управления асинхронными электроприводами при моделировании АД нашел место уникальный принцип ориентации системы координат по вектору потокосцепления ротора.
В данном случае имитационная модель АД приобретает определенное сходство со структурной схемой машины постоянного тока, где возможно раздельное управление магнитным состоянием и моментом на валу двигателя.
Математически условие ориентации применительно) выражается следующим образом:
![]() ;
; ;
;![]() .
.
Уравнения, описывающие АД в системе координат с принудительной ориентацией по вектору потокосцепления ротора.
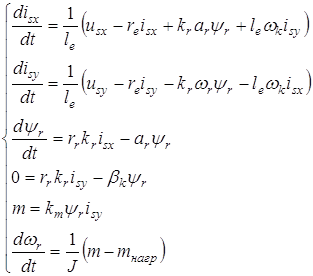
В системе ![]() представляет собой скольжение системы координат, а
представляет собой скольжение системы координат, а ![]() соответственно скорость её вращения. Данные параметры определяются в соответствии со следующими выражениями:
соответственно скорость её вращения. Данные параметры определяются в соответствии со следующими выражениями:
 ;
;![]() .
.
В системе уравнений переменные с индексами «x» и «y» соответствуют компонентам пространственного вектора в координатной системе с ориентацией по вектору потокосцеплений ротора ![]() . С помощью правил создания и преобразования структурных схем, принятых в теории автоматического управления , представим систему уравнений в виде структурной схемы. На рис. представлена структурная схема, имитационной модели АД в системе координат с ориентацией по вектору потокосцепления ротора
. С помощью правил создания и преобразования структурных схем, принятых в теории автоматического управления , представим систему уравнений в виде структурной схемы. На рис. представлена структурная схема, имитационной модели АД в системе координат с ориентацией по вектору потокосцепления ротора ![]() .
.
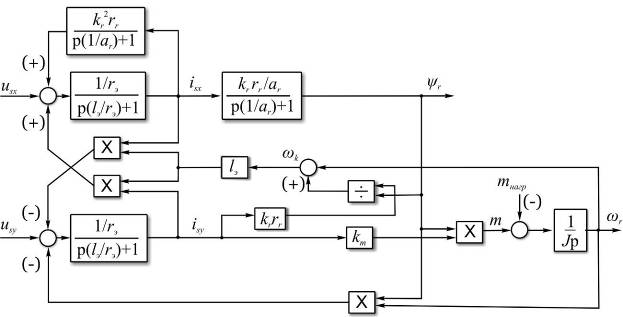
Рисунок 16 – Структурная схема имитационной модели АД в системе координат с ориентацией по вектору потокосцепления ротора ![]()
Модель АД, представленная на рис. удобна для реализации и расчёта в любом из прикладных программных продуктов, поддерживающих объектно-структурное моделирование систем (Simulink-Matlab, Windora и т.д.). Для исследования и проверки адекватности созданной модели АД удобно выполнить её реализацию в среде Simulink-Matlab. В данной системе симметричные трёхфазные напряжения, представленные в относительных единицах подвергаются преобразованию Кларка и поступают в виде компонентов пространственного вектора напряжений ![]() и
и ![]() на входы координатного преобразователя Парка-Горева. Формулы для координатного преобразования Парка-Горева, позволяющего реализовать переход от стационарной системы координат к вращающейся представлены ниже:
на входы координатного преобразователя Парка-Горева. Формулы для координатного преобразования Парка-Горева, позволяющего реализовать переход от стационарной системы координат к вращающейся представлены ниже:
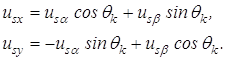
Здесь ![]() ,
, ![]() - составляющие пространственного вектора напряжения статора
- составляющие пространственного вектора напряжения статора ![]() , представленные в стационарной системе координат;
, представленные в стационарной системе координат;
![]() ,
, ![]() - составляющие вектора напряжения статора
- составляющие вектора напряжения статора ![]() , представленные во вращающейся системе координат;
, представленные во вращающейся системе координат;
![]() - угол поворота вращающейся координатной системы (угол ориентации). Параметр
- угол поворота вращающейся координатной системы (угол ориентации). Параметр ![]() связан с угловой скоростью вращения координатной системы
связан с угловой скоростью вращения координатной системы ![]() благодаря следующему выражению:
благодаря следующему выражению:
![]() .
.
Графически преобразование Парка-Горева иллюстрируется на рис.
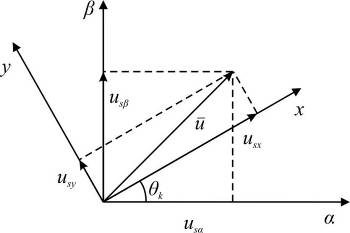
Рисунок 17 – График преобразований Парка-Горева для связи между вращающейся и стационарной системой координат
Координатный преобразователь Парка-Горева сориентирован совместно с системой координат разработанной имитационной модели АД. Благодаря этому на входы модели по напряжению ![]() и
и ![]() поступают компоненты пространственного вектора напряжения, представленного во вращающейся системе координат.
поступают компоненты пространственного вектора напряжения, представленного во вращающейся системе координат.
Похожие работы
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... большей стабильности платформы может быть установлено два варианта стабилизатора: система блокировки подвески и опускающийся на землю позади машины стабилизатор. По сравнения с обычными 120-мм минометными системами, «SRAMS» обладает рядом характеристик, позволяющих увеличить ее скорострельность. В том числе установлена полуавтоматическая система подачи снарядов и запатентованный клапан зарядного ...
... . Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др. 2 Теории и практики автоматизированного электропривода Электрический привод обеспечивает все отрасли народного хозяйства механической энергией, полученной из электрической, осуществляет практически все технологические операции, связанные с механическим движением, во ...
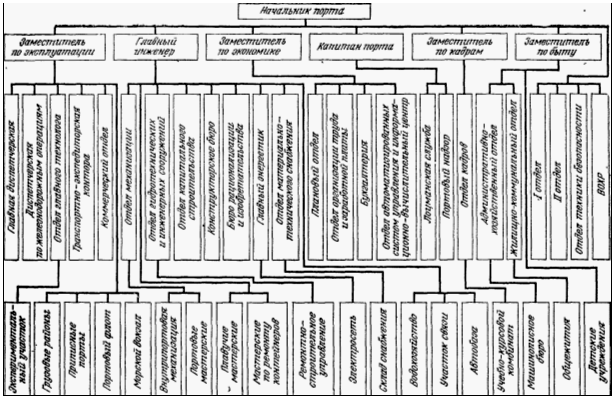
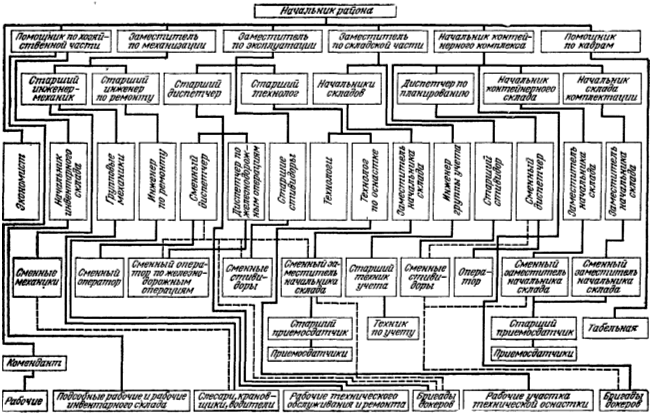

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев