Описание технологического процесса, как объекта управления
Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Каналов ввода/вывода
Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП
Функциональная структура системы управления ТП. Описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структурный и параметрический синтез регуляторов системы управления технологическим процессом
Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Навигация
Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Автоматическая система управления процессом испытаний электропривода лифтов
63311
знаков
3
таблицы
31
изображение
1.3 Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Схема технологического процесса испытаний электропривода лифтов представлена на рисунке 4:
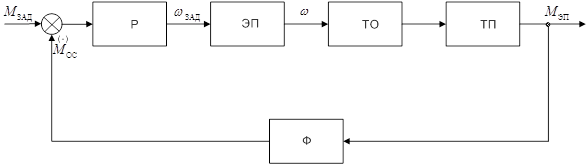
Рисунок 4 – Схема технологического процесса испытаний электропривода лифтов
На данной схеме представлены следующие обозначения типовых блоков:
Р – регулятор;
ЭП – электропривод, включающий питающую сеть, совместно с трансформатором, необходимым для согласования напряжений питающей сети и двигателя; приводной двигатель и преобразователь;
ТО – технологическое оборудование, включающее все необходимое оборудование, непосредственно участвующее в технологическом процессе;
ТП – технологический процесс;
Ф – формирователь момента, включенный в обратную отрицательную связь на вход задающего воздействия – в данном случае это тензометрический датчик момента.
Основными технологическими переменными являются:
- Мзад – задающее воздействие, характеризующее требуемую величину нагрузочного момента, создаваемого нагрузочным двигателем;
- ωзад – сигнал задания скорости с выхода регулятора Р (управляющее воздействие), пропорциональный задающему воздействию;
- ω – сигнал управления (переменная состояния ЭП), формируемый электроприводом для управления технологическим оборудованием;
- М – выходное значение нагрузочного момента (переменная состояния ТП), отработанное замкнутым контуром схемы технологического процесса;
- Мос – сигнал отрицательной обратной связи, поступающий с блока формирования момента.
В качестве датчика скорости и датчика угла поворота используется два импульсных датчика (инкрементные энкодеры).
Технологический процесс состоит в следующем: задающее воздействие Мзад суммируется с сигналом обратной связи Мос, поступающим с тензометрического датчика момента и поступает на регулятор Р, на выходе которого формируется сигнал задания скорости ωзад, пропорциональный значению входного сигнала Мзад-Мос (ошибки по управлению ε). Сигнал задания скорости ωзад является управляющим воздействием для электропривода ЭП, задатчик скорости которого формирует сигнал напряжения управления Uу и подает на вход системы управления преобразователем, который, в свою очередь управляет двигателем и приводит его во вращение с скоростью ω. Далее приводной двигатель, работающий с заданной скоростью ω, приводит в движение редуктор который преобразует величину входного момента и формирует выходной сигнал Мэп.
На рисунке 5 представлена структура системы векторного управления нагрузочным асинхронным ЭП для случая работы в режиме упора. Система базируется на имитационной модели АД во вращающихся координатах, сориентированных по вектору потокосцепления ротора и представляет собой классическую структуру векторного управления с дополнительным внешним контуром положения. Для поддержания высокой стабильности характеристик и максимального быстродействия используется режим работы при задании постоянного потокосцепления ротора.
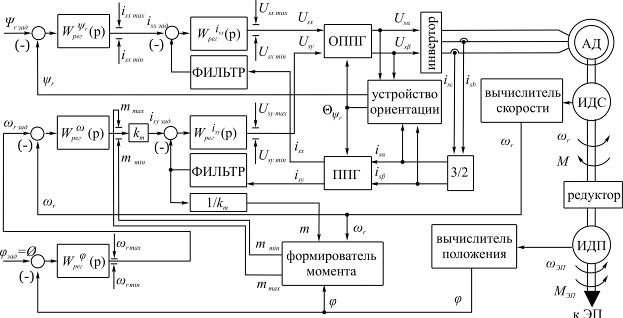
Рисунок 5 – Структура системы управления нагрузочным ЭП
На рисунке 5 приняты следующие обозначения:
ППГ – преобразователь Парка-Горева,
ОППГ – обратный преобразователь Парка-Горева,
3/2 – модуль преобразований из трёхфазной системы статорных токов в составляющие пространственного вектора,
ИДС – импульсный датчик скорости,
ИДП – импульсный датчик положения,
Для минимизации взаимного влияния между перекрёстными контурами
управления потокосцеплением ротора и скорости использовано их преднамеренное разделение по быстродействию. Для решения задачи косвенного определения переменных параметров АД, недоступных для прямого измерения, но необходимых для организации качественного векторного управления использовано устройство вычисления переменных на базе обращённой имитационной модели АД с автоматической системой для компенсации внешних возмущений.
1.4 Классификация и перечень измеряемых переменных состояния, определение требуемой точности управления технологическим процессом. Определение условий работы измерительных устройств
На микроконтроллер возложены функции мониторинга состояния системы осуществляемого с помощью датчиков тока статора АД. Контроль за положением и скоростью системы выполняется с помощью импульсных квадратурных датчиков положения (ДП), установленном на выходном валу ЭП, и скорости (ДС), расположенном на валу АД.
Устройства получения информации о состоянии технологического процесса предназначены для сбора и преобразования информации без изменения ее содержания о контролируемых и управляемых параметрах ТП. Входом устройств являются естественные или унифицированные сигналы, выходом – соответствующие значения унифицированных сигналов.
К устройствам для получения информации о состоянии процесса, образующим канал сбора и преобразования информации, относят чувствительные элементы или собственно датчики.
Датчики физических величин воспринимают контролируемый параметр и преобразуют его в величину, удобную для передачи по каналам связи или дальнейшего преобразования.
Основными характеристиками измерительных устройств для получения информации о состоянии ТП (датчики) являются: входная величина, воспринимаемая и преобразуемая датчиком; выходная величина, используемая для передачи информации; статическая и динамическая характеристики датчика; порог чувствительности; основная и дополнительные погрешности.
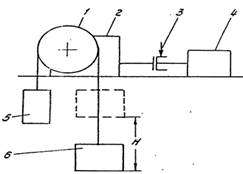
Измерительные устройства, входящие в состав АСУ:
1. Встраиваемая в ПЭВМ многофункциональная плата ввода/вывода PC104
фирмы Fastwell;
2. Комплект измерительных датчиков тока Honeywell типа K591-001
3. Источник питания датчиков типа ПБ-96
4. Инкрементный датчик положения (энкодер) – 2 шт.
5. Тензометрический датчик момента KYOWA TP-E
6.Программное обеспечение: операционная система Windows-XP, инструментальная система для разработки прикладного ПО Visual C++, прикладные программы.
Данный метод обеспечивает измерение, с погрешностью не более 1,5 %, следующих величин: переменного тока в фазах нагрузочного двигателя, частоты вращения приводного двигателя, частоты вращения испытуемого ЭП, положения вала испытуемого двигателя.
В процессе проведения испытаний измеряются и регистрируются следующие параметры:
Нагрузочного двигателя: токи в фазах двигателя, частота вращения двигателя.
Испытуемого двигателя: частота вращения, положение вала.
Характеристики:
Похожие работы
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... большей стабильности платформы может быть установлено два варианта стабилизатора: система блокировки подвески и опускающийся на землю позади машины стабилизатор. По сравнения с обычными 120-мм минометными системами, «SRAMS» обладает рядом характеристик, позволяющих увеличить ее скорострельность. В том числе установлена полуавтоматическая система подачи снарядов и запатентованный клапан зарядного ...
... . Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др. 2 Теории и практики автоматизированного электропривода Электрический привод обеспечивает все отрасли народного хозяйства механической энергией, полученной из электрической, осуществляет практически все технологические операции, связанные с механическим движением, во ...

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев