Навигация
Анализ систем автоматического регулирования температуры поливной воды в теплице
18741
знак
1
таблица
9
изображений
Министерство сельского хозяйства и продовольствия Республики Беларусь
Белорусский Государственный Аграрный ТехническийУниверситет
Кафедра автоматизированных систем управления производством
Курсовая работа
По "Основам автоматики"
Анализ систем автоматического регулирования температуры поливной воды в теплице
Руководитель Гагаков Ю.В
Студента гр. 31а Маркус А.С.
Минск-2008г.
СОДЕРЖАНИЕ
Введение
1. Характеристика объекта управления, описание устройства и работы системы САР, составление ее функциональной схемы. Принцип автоматического управления и вид системы
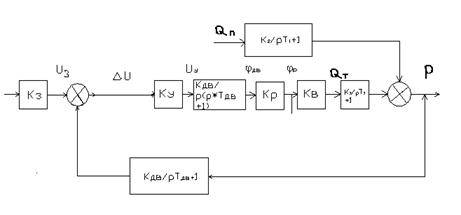
2. Составление структурной схемы системы
3. Определение закона регулирования системы
4. Определение передаточных функций системы по управляющему и возмущающему воздействиям для ошибок по этим воздействиям
5. Анализ устойчивости системы. Определение запасов устойчивости
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
8. Оценка качества управления по переходным функциям
9. Общие выводы по работе
Литература
ВВЕДЕНИЕ
Цель работы: закрепление базовых данных и знаний по курсу "Основы автоматики" на примере проведенных анализов системы автоматического регулирования.
Задание:
1. Дать краткую характеристику объекта управления, описать устройство и работу системы, составить ее функциональную схему. Сделать вывод о принципе автоматического управления, использованном в системе и виде системы.
2. Составить структурную схему системы.
3. Определить закон регулирования системы.
4. Определить передаточные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
5. Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запас устойчивости.
6. Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой зависимости.
7. Провести совместный анализ изменения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
8. Оценить качество регулирования по переходным функциям.
9. Сделать общие выводы по работе.
Исходные данные: Схема №19;
К1=50; К2=1; Т1=50 с; Кд=0,2; Тд=3 с;
Ку=40; Кдв=0,01; Кр=0,2; Кв=0,9; Кп=2; Тдв=0,5 с;
1. ХАРАКТЕРИСТИКА ОБЪЕКТА УПРАВЛЕНИЯ, ОПИСАНИЕ УСТРОЙСТВА И РАБОТЫ СИСТЕМЫ САР, СОСТАВЛЕНИЕ ЕЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ. ПРИНЦИП АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И ВИД СИСТЕМЫ

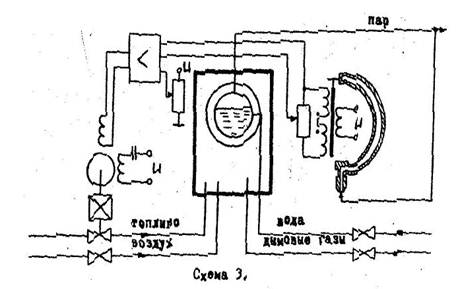
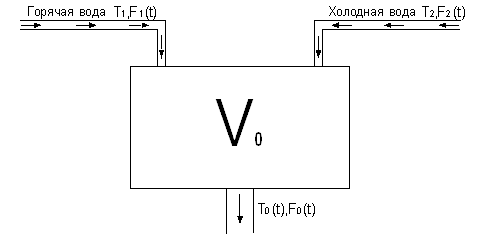
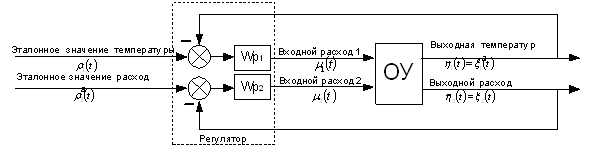
Рисунок 1.1. САР температуры поливной воды в теплице.
Объектом управления (ОУ) рассматриваемой САР является скоростной водонагреватель. Регулируемой величиной является температура поливной воды Θ. Целью управления является постоянное поддержание температуры поливной воды на заданном уровне. Управляющим воздействием на ОУ является расход горячей воды протекающей через скоростной водонагреватель Qв. Основное возмущающее воздействие – колебание расхода поливной воды, изменение температуры холодной воды поступающей из котельной Θх.
Датчиком (Д) является термометр сопротивления совместно с измерительным блоком. Входной сигнал для датчика – температура поливной воды Θ, выходной сигнал – величина напряжение Uд.
Задатчиком является сопротивление R1. Задающий сигнал – это величина сопротивления R1, которое в определенном масштабе соответствует заданному значению температуры Θз в помещении.
Дифференциальный усилитель (ДУ) выполняет функции устройства сравнения (вычитания) входных сигналов и усиления их разности. На вход усилителя поступают напряжения Uд , Uз и напряжение Uос устройства местной обратной связи. Выходной сигнал усилителя - Напряжение Uу, подаваемое на электродвигатель.
Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя и редуктора. Входной сигнал для электродвигателя – напряжение Uу, выходной сигнал – угол поворота φд вала электродвигателя. Входной сигнал для редуктора - φд, выходной сигнал - угол поворота вала φр редуктора.
Устройство местной обратной связи (УОС) выполнено в виде потенциометрического датчика перемещения, подвижный контакт которого механически связан с выходным валом редуктора. Входной сигнал УОС – угол поворота φр, выходной сигнал – напряжение Uос.
Регулирующим органом (РО) является регулирующий вентиль для жидкостей. Входной сигнал – угол поворота φр, выходной сигнал – расход жидкости через вентиль Qв.
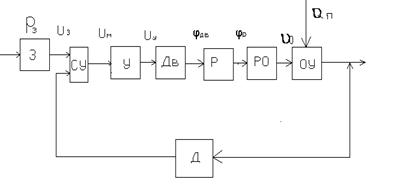
На основании вышеизложенного функциональная схема системы составлена следующим образом:
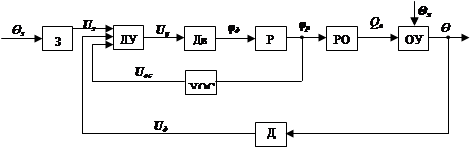
Рисунок 1.2 Функциональная схема системы.
Система работает следующим образом:
В установившемся режиме при равенстве температуры Θ в водонагревателе заданной Θз выходное напряжение дифференциального усилителя Uм равно 0. При отклонении температуры в водонагревателе от заданной, например, вследствие изменения расхода воды Q, сопротивление датчика RΘ изменяется, и через измерительный блок меняет напряжение на входе в дифференциальный усилитель. Напряжение Uy , являющееся сигналом возникшей ошибки системы, усиливается усилителем и подается на электродвигатель. Двигатель через редуктор открывает заслонку в нужную сторону, тем самым изменяя расход воды проходящей через водонагреватель. Если температура воды ниже заданной, то угол поворота заслонки увеличивается, если температура выше заданной, то угол поворота заслонки уменьшается. Одновременно выходной вал редуктора перемещает подвижный контакт потенциометрического датчика местной обратной связи, выходное напряжение Uос которого подается на дифференциальный усилитель. Усилитель усиливает разность напряжений Uд , Uз и Uос. За счет местной обратной связи обеспечивается пропорциональная зависимость между напряжением Uд и углом поворота вала редуктора. Поэтому изменение расхода воды пропорционально величине отклонения температуры воды от заданного значения.
При непрерывном изменении температуры поливной воды процесс регулирования идет непрерывно. Если температура установиться, то при правильно подобранных параметрах регулятора процесс регулирования через некоторое время закончиться и вся система придет в новое установившиеся состояние.
В результате рассмотрения устройства и работы системы можно сделать следующие выводы:
В системе реализован принцип управления по отклонению (ошибке).
Система является стабилизирующей.
Похожие работы
... 10. Общие выводы по работе Литература 1. Цель работы. Задание. Исходные данные Цель работы: закрепление базовых данных и знаний по курсу "Основы автоматики" на примере проведенных анализов системы автоматического регулирования. Задание: 1. Дать краткую характеристику объекта управления, описать устройство и работу системы, составить ее функциональную схему. Сделать вывод о принципе ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... . Размножение ранней капусты позволяет получить ее продукцию в июле вместо сентября. Рассадный метод повышает урожайность растений. В возделывании капусты во всем мире перешли к использованию рассады с закрытой корневой системой (земляным комом). По данной технологии для выращивания рассады используются кассеты типа "Плантек" разного размера. Преимущества кассетной рассады следующие: рассада ...
... на лучшее, а готовься к худшему. Исчерпание мировой нефти к 2050 году — это не худший сценарий, а скорее оптимистический, основанный на доверии к имеющейся информации. Которой я лично не доверяю. АМЕРИКА ПРОТИВ РОССИИ Часть 3 НЕФТЯНАЯ НАРКОЗАВИСИМОСТЬ Но может быть, можно без нефти обойтись? Жили же наши деды? Это самый интересный вопрос, который почему-то не всегда правильно понимается. Так ...
0 комментариев