Навигация
АНАЛИЗ ЗАВИСИМОСТИ СТАТИЧЕСКОЙ ОШИБКИ СИСТЕМЫ ОТ ИЗМЕНЕНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ НА СИСТЕМУ
18741
знак
1
таблица
9
изображений
6. АНАЛИЗ ЗАВИСИМОСТИ СТАТИЧЕСКОЙ ОШИБКИ СИСТЕМЫ ОТ ИЗМЕНЕНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ НА СИСТЕМУ
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
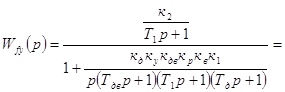
Воспользуемся передаточной функцией для ошибки по управляющему воздействию, полученной в разделе 4 для нашей системы:

В статистике р обращается в ноль, поэтому
![]()
где К - коэффициент передачи разомкнутой системы.
Таким образом
![]()
После подстановки численного значения K получим ![]() .
.
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему. Из выражения для статической ошибки следует, что величина статической ошибки тем меньше, чем больше коэффициент передачи разомкнутой системы.
7. СОВМЕСТНЫЙ АНАЛИЗ ИЗМЕНЕНИЯ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ ОБЪЕКТА УПРАВЛЕНИЯ И СИСТЕМЫ ОТ ВОЗМУЩАЮЩЕГО ВОЗДЕЙСТВИЯ В СТАТИКЕ. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКОЙ ОШИБКИ СИСТЕМЫ ПО ВОЗМУЩАЮЩЕМУ ВОЗДЕЙСТВИЮ
Воспользуемся передаточными функциями объекта управления и системы по возмущающему воздействию.
![]()

В статике р обращается в ноль, поэтому для объекта:
![]()
![]()
Для системы:
![]()
![]()
где К– коэффициент передачи разомкнутой системы.
После подстановки численных значений параметров получаем зависимость изменения давления пара на объекте при изменении расхода пара.
![]() - для объекта без регулятора;
- для объекта без регулятора;
![]() - для объекта, снабженного регулятором (САР).
- для объекта, снабженного регулятором (САР).
Передаточная функция системы для ошибки по возмущающему воздействию:
![]()
Поэтому для нашей системы:
![]()
Таким образом, температура поливной воды в теплице, не оборудованном регулятором, изменяется также, как изменяется расход воды на полив.
В системе оборудованной регулятором изменение температуры уменьшилось по сравнению с изменением расхода воды в 1+K раз.
8. ОЦЕНКА КАЧЕСТВА УПРАВЛЕНИЯ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
Рассмотрим оценку прямых показателей качества управления нашей системы.
Для переходной функции по управляющему воздействию определяется перерегулирование.
 %
%
где ![]() - максимальное значение регулируемой величины в переходном процессе;
- максимальное значение регулируемой величины в переходном процессе; ![]() - установившееся значение регулируемой величины.
- установившееся значение регулируемой величины.
В нашем случае:
![]() %=
%=![]() %=18,5%
%=18,5%
Если нет специальных требований к системе, то нормальным считается перерегулирование ![]() <30%.
<30%.
Для переходных процессов по возмущающему воздействию определяется максимальное отклонение регулируемой величины от установившегося значения, приходящееся на единицу возмущающего воздействия F(t):
![]()
В нашем случае при F(t)=1(t)
![]()
Быстродействие системы оценивается временем регулирования. Время регулирования ![]() определяется как интервал времени от начала переходной функции до момента, когда отклонение выводной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины
определяется как интервал времени от начала переходной функции до момента, когда отклонение выводной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ![]() :
:
![]()
Примем ![]() . В нашей системе для переходной функции по управляющему воздействию:
. В нашей системе для переходной функции по управляющему воздействию:
![]()
![]() c.
c.
Для переходной функции по возмущающему воздействию:
![]()
![]() c.
c.
Колебательность переходного процесса определяется числом N перерегулирования для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. Для нашей системы N=2, обычно приемлемым числом колебаний считается N![]() 2…3.
2…3.
Колебательность также оценивается отношением соседних отклонений регулируемой величины от установившихся значений:
![]()
В нашей системе для переходного процесса по управляющему воздействию:
![]()
Для переходного процесса по возмущающему воздействию:
![]()
По переходной функции может быть определена статическая ошибка системы:
![]()
где ![]() – заданное значение регулируемой величины.
– заданное значение регулируемой величины.
Для нашей системы статическая ошибка по управляющему воздействию:
![]()
Статическая ошибка по возмущающему воздействию:
![]()
По результатам выполнения раздела 8 для САР регулирования температуры поливной воды в теплице можно сделать следующие выводы:
Для рассмотренной системы перерегулирование составляет 18,5%, число перерегулирований и колебаний системы за время переходного процесса N=2. Качество системы по этим показателям следует считать удовлетворительным.
Время регулирования составляет около 40 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, равно -0,181.
Колебательность системы равна 0, изменение статической ошибки системы при изменении задающего воздействия составляет 18,5%, а возмущающего воздействия составляет 46% от изменения этих воздействий.
9. ОБЩИЕ ВЫВОДЫ ПО РАБОТЕ
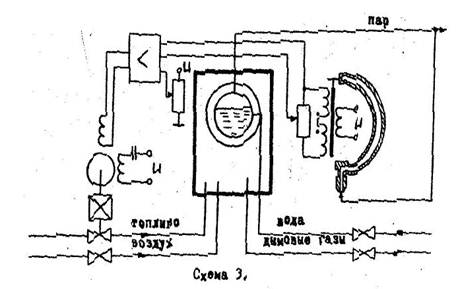
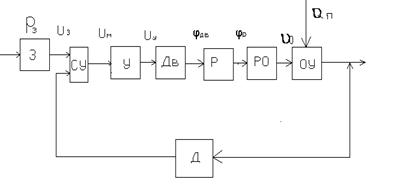
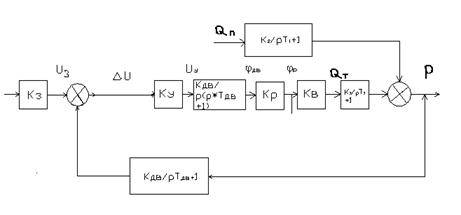
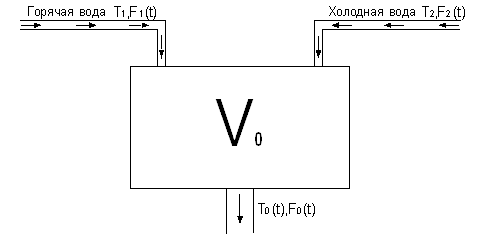
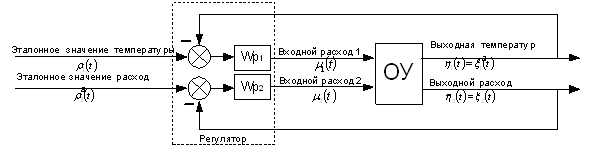
Объектом управления САР температуры поливной воды в теплице является скоростной водонагреватель. Управляющим воздействием на объект является расход поливной воды протекающей через скоростной водонагреватель. Основное возмущающее воздействие изменение расхода воды на полив.
Закон регулирования - пропорциональный.
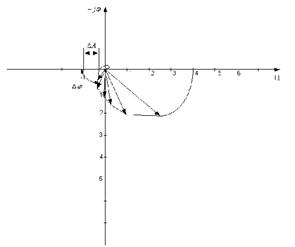
Система устойчива. Запас устойчивости по амплитуде 0,8, по фазе 30о, что удовлетворяет рекомендованным запасам устойчивости. Система является статической. Статическая ошибка по управляющему воздействию ![]() , статическая ошибка по возмущающему воздействию
, статическая ошибка по возмущающему воздействию![]() .
.
Прямые оценки качества управления следующие:
Перерегулирование ![]() =18,5%; число перерегулирований и колебаний N=2, что удовлетворяет предъявляемым требованиям; время регулирования составляет около 40 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет 0,181;Колебательность системы равна 0. Качество системы следует считать удовлетворительным.
=18,5%; число перерегулирований и колебаний N=2, что удовлетворяет предъявляемым требованиям; время регулирования составляет около 40 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет 0,181;Колебательность системы равна 0. Качество системы следует считать удовлетворительным.
![]()
![]()
![]()
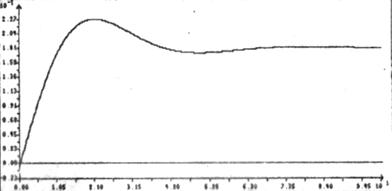
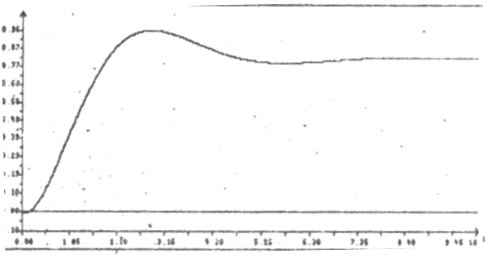
Рис.8.1 Переходная функция по возмущающему воздействию САР температуры в животноводческом помещении.
Литература
1. Юревич Е.Н. "Теория автоматического управления", Л.: Энергия,1975
2. Бородин И.Ф., Кирилин Н.И. "Основы автоматики и автоматизации производственных процессов". М.: Колос, 1977
3. Бабанов Н.А., Воронов А.А. и др. Солодовников В.В., Плотников В.Н., Яковлев А.В. "Основы теории и элементы систем автоматического регулирования". М.: Машиностроение, 1985
4. Бохан Н.И., Бородин И.Ф., Дробышев Ю.В., Фурсенко С.Н., Герасенков А.А. "Средства автоматики и телемеханики". М.: Агропромиздат, 1992
5. Бородин И.Ф. "Технические средства автоматики" М.: Колос, 1982
6. Бохан Н.И., Фурунжиев Р.И. "Основы автоматики и микропроцессорной техники" Мн.: Ураджай,1987
7. Сидоренко Ю.А. "Методические указания к курсовой работе для специальности С.03.02" Минск-2001г.
Похожие работы
... 10. Общие выводы по работе Литература 1. Цель работы. Задание. Исходные данные Цель работы: закрепление базовых данных и знаний по курсу "Основы автоматики" на примере проведенных анализов системы автоматического регулирования. Задание: 1. Дать краткую характеристику объекта управления, описать устройство и работу системы, составить ее функциональную схему. Сделать вывод о принципе ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... . Размножение ранней капусты позволяет получить ее продукцию в июле вместо сентября. Рассадный метод повышает урожайность растений. В возделывании капусты во всем мире перешли к использованию рассады с закрытой корневой системой (земляным комом). По данной технологии для выращивания рассады используются кассеты типа "Плантек" разного размера. Преимущества кассетной рассады следующие: рассада ...
... на лучшее, а готовься к худшему. Исчерпание мировой нефти к 2050 году — это не худший сценарий, а скорее оптимистический, основанный на доверии к имеющейся информации. Которой я лично не доверяю. АМЕРИКА ПРОТИВ РОССИИ Часть 3 НЕФТЯНАЯ НАРКОЗАВИСИМОСТЬ Но может быть, можно без нефти обойтись? Жили же наши деды? Это самый интересный вопрос, который почему-то не всегда правильно понимается. Так ...
0 комментариев