Навигация
Анализ одноконтурной САУ четвёртого порядка
9774
знака
7
таблиц
20
изображений
Томский государственный университет
систем управления и радиоэлектроники (ТУСУР)
Высший колледж информатики, электроники
и менеджмента (ВКИЭМ)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ ПО ТАУ
Система автоматического управления
Выполнил студент гр.
.
«____» ______ 200 г.
Проверил преподаватель каф.
.
«____» ______ 200 г.
г. Томск
200 г.
1. Содержание
1.Введение
2.Краткий анализ технического задания
3.Расчетная часть
3.1.Исходные данные
3.2.Расчёт передаточной функции W1(p)
3.3.Определение передаточных функций САУ
3.4.Анализ устойчивости САУ
3.5.Граничное значение коэффициента передачи (К) разомкнутой цепи САУ
3.6.Определение нового коэффициента передачи k2ГР и КГР
3.7.Внешняя характеристика САУ
3.8.Регулировочная характеристика САУ
3.9.Расчёт логарифмических частотных характеристик САУ
3.10.Расчёт частотных характеристик замкнутой САУ
3.11.Показатели качества регулирования
3.12.Расчёт переходных характеристик замкнутой САУ
3.13.Новые показатели качества регулирования
3.14. Синтез последовательного корректирующего устройства
3.15.Переходные характеристики скорректированной САУ
3.16.Показатели качества регулирования скорректированной САУ
3.17.Моделирование скорректированной САУ
4.Заключение
5.Список литературы
1. Введение
Теория автоматического управления (ТАУ) является одной из наиболее важных общетехнических дисциплин. Основная задача курсового проекта - научиться на конкретных примерах и задачах практическому применению приёмов и методов, применяемых при анализе и синтезе систем автоматического управления. Курсовой проект посвящён анализу одноконтурной САУ четвёртого порядка. В ходе выполнения курсового проекта требуется получить передаточные функции звеньев которые заданы в виде пассивных четырёхполюсников или схем на операционных усилителях. Кроме того, на заключительном этапе выполнения курсового проекта необходимо произвести настройку исходной САУ на минимальное время переходного процесса.
2. Краткий анализ технического задания
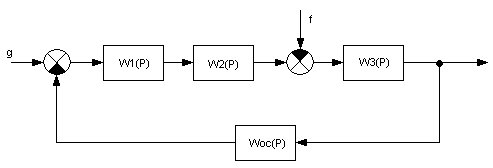
В курсовом проекте необходимо произвести анализ одноконтурной САУ четвёртого порядка. В ходе выполнения курсового проекта требуется получить передаточные функции звеньев которые заданы в виде пассивных четырёхполюсников или схем на операционных усилителях. Кроме того, на заключительном этапе выполнения курсового проекта необходимо произвести настройку исходной САУ на минимальное время переходного процесса, путём настройки системы на технический оптимум.
3. Расчетная часть
3.1. Исходные данные
Передаточные функции звеньев:
![]()
![]()
![]()
| k2 | k3 | kос | Т2,с | Тос,с | g,В | f,В | DG,дБ | Варьируемые параметры | |
| x1 | x2 | ||||||||
| 2 | 10 | 0.3 | 0.01 | 0.02 | 60 | 20 | 10 | Т2 | k2 |
Табл. 1.1. Исходные данные для расчета
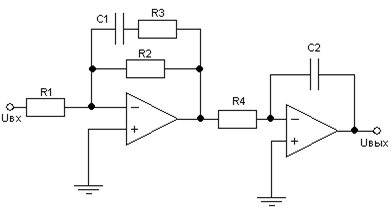
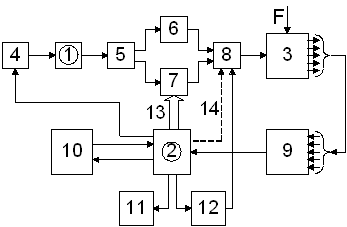
Рис. 1.2. Схема звена с передаточной функцией W1(p)
| R1,Ом | R2,Ом | R3,Ом | R4,Ом | C1,Ф | C2,Ф |
| 10*103 | 30*103 | 20*103 | 100*103 | 10*10-6 | 10-6 |
Табл. 1.2. Параметры схемы с передаточной функцией W1(P)
3.2. Расчёт передаточной функции W1(p)
![]()
![]()
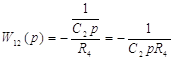
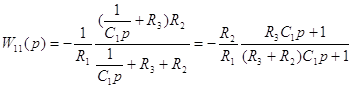
![]()
| k1 | T11 | T12 | T13 | |
| Выражение |
|
|
|
|
| Значение | 3 | 0.2 | 0.5 | 0.1 |
Табл. 3.2.1. Коэффициенты передачи и постоянные времени для W1(P)
![]()
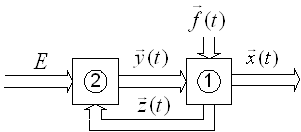
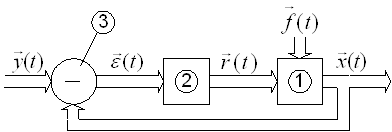
3.3. Определение передаточных функций САУ
![]()
![]()
![]()
![]()
1. Передаточная функция разомкнутой САУ по задающему воздействию:
![]()
2. Передаточная функция разомкнутой САУ по возмущающему воздействию:
![]()
3. Передаточная функция разомкнутой цепи САУ
![]()
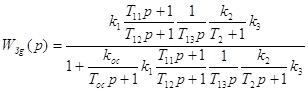
4. Передаточная функция замкнутой САУ по задающему воздействию
![]()
![]()
Похожие работы
... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
0 комментариев