Навигация
Показатели качества регулирования скорректированной САУ
9774
знака
7
таблиц
20
изображений
3.15. Показатели качества регулирования скорректированной САУ
Время, соответствующее максимуму переходной характеристики.
![]()
![]()
![]()
![]()
![]()
Время переходного процесса при подаче задающего воздействия.
![]()
![]()
![]()
![]()
![]()
Перерегулирование
![]()
3.16. Моделирование скорректированной САУ.
Передаточная функция замкнутой скорректированной САУ
![]()
Характеристический полином
![]()
Корни характеристического полинома
![]()
То есть замкнутая САУ эквивалентна последовательно соединённым колебательному и форсирующему звеньям. Параметры колебательного звена находим с использованием теоремы Виетта:
![]()
![]()
![]()
Постоянная времени форсирующего звена:
![]()
Общий коэффициент передачи САУ по задающему воздействию равен:
![]()
Форсирующее звено:![]()
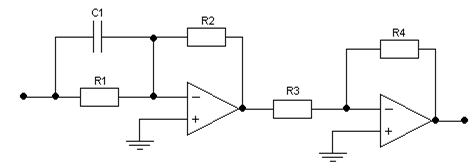
Рис. 3.16.1. Форсирующее звено
| C1, Ф | R1, Ом | R2, Ом | |
| Формула |
|
| |
| Значение | 1*10-6 | 2*104 | 6,667*104 |
Колебательное звено: ![]()
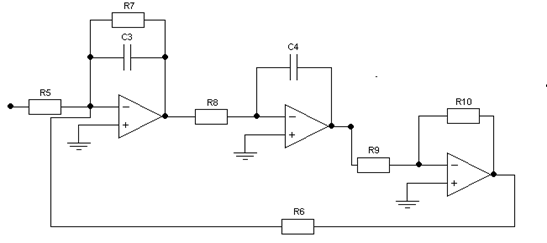
Рис. 3.16.2. Колебательное звено
| R5, Ом | R6, Ом | R7, Ом | R8, Ом | R9, Ом | R10, Ом | С3, Ф | С4, Ф | |
|
|
|
|
| |||||
| Значение | 1*103 | 1*103 | 1*103 | 2*103 | 1*103 | 1*103 | 10*10-6 | 10*10-6 |

Табл. 3.16.2. Колебательное звено
Схема смооделированной скорректированной САУ с подключённым источником питания и осцилографом.
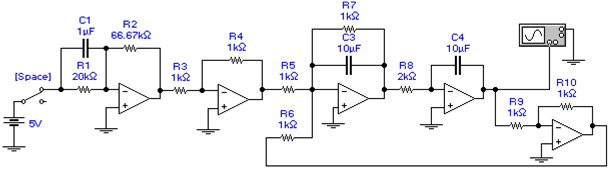
Рис. 3.16.3. Схема смоделированной скорректированной САУ
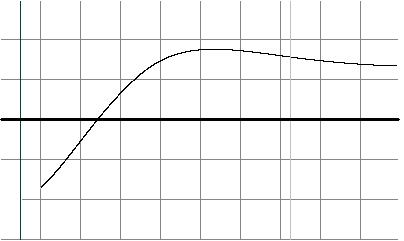
Рис. 3.16.4. Диаграмма нвпряжения на выходе
Вертикальные линии показывают время переходного процесса.
Размерность по времени: 1 клетка - 0.01 секунды
Размерность по амплитуде: 1 клетка - 5 вольт
Откуда находим:
Время переходного процесса 6.457E-2
Перерегулирование: 17.32%
Выводы: некоторые несовпадения теоретических расчётов с моделированием в пакете Electronical Workbench связаны с неточностью интегрирования дифференциальных уравнений составленных пакетом.
4. Заключение.
В данном курсовом проекте произведён анализ одноконтурной САУ четвёртого порядка. В ходе выполнения курсового проекта получены передаточные функции звеньев которые заданы в виде схем на операционных усилителях. Кроме того, на заключительном этапе выполнения курсового проекта произведена настройка исходной САУ на минимальное время переходного процесса, путём её настройки на технический оптимум.
В ходе выполнения курсового проекта мы научиться на конкретных примерах и задачах практическому применению приёмов и методов, применяемых при анализе и синтезе систем автоматического управления.
5. Список литературы
6.
1) Лебедев Ю.М. Теория автоматического управления. Учебное методическое пособие. Изд. третье. Томск; ТУСУР, 2000 – 141 с.
2) Фельбаум А.А., Бутковский А.Г., Методы теории автоматического управления. Главная редакция физико-математической литературы изд-ва «Наука», М., 1971, 744 стр.
3) Кориков А.М. Основы теории управления: Учебное пособие. 2-е изд. – Томск: Изд-во НТЛ, 2002. – 392 с.
4) Коновалов Б.И. Теория автоматического управления. Конспект лекций для студентов специальности «Промышленная электроника», Томск; ТУСУР, 1997 г.
Похожие работы
... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
0 комментариев