Навигация
Синтез последовательного корректирующего устройства
9774
знака
7
таблиц
20
изображений
3.14. Синтез последовательного корректирующего устройства
Передаточные функции:
![]()
![]()
![]()
![]()
Минимальная постоянная времени САУ равна T2=0.01 с
![]()
![]()
Отсюда находим передаточную функцию корректирующего звена:
![]()
Полученное корректирующее устройство представляет собой последовательное соединение: инерционно форсирующего звена (T12>T11) и форсирующего звена.
![]()
Инерционно форсирующее звено:
![]()
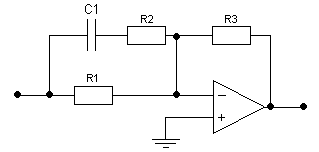
Рис 3.13.1. Инерционно – форсирующее звено
| C1, Ф | R1, Ом | R2, Ом | R3, Ом | |
| Формула |
|
|
| |
| Значение | 10*10-6 | 3*104 | 2*104 | 1.392*104 |
Табл. 3.13.1. Параметры инерционно – форсирующего звена
Форсирующее звено:
![]()
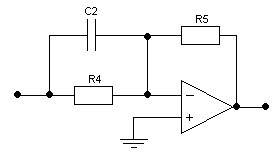
Рис 3.13.2. Форсирующее звено
| C2, Ф | R4, Ом | R5, Ом | |
| Формула |
|
| |
| Значение | 10*10-6 | 2*103 | 2*103 |
Табл. 3.13.2. Параметры форсирующего звена
3.14. Переходные характеристики скорректированной САУ
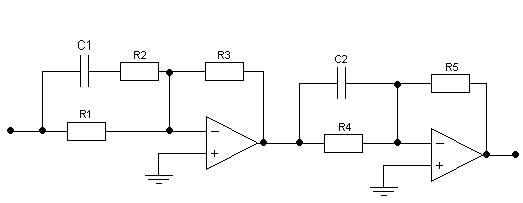
Рис. 3.14.1. Корректирующее звено
Передаточные функции разомкнутой и замкнутой скорректированной САУ по задающему воздействию

![]()
Характеристический полином и его производная
![]()
![]()
Где:
![]()
![]()
![]()
Числитель передаточной функции скорректированной замкнутой САУ:
![]()
Корни характеристического полинома

![]()
![]()
Переходные характеристики скорректированной САУ
![]()
![]()
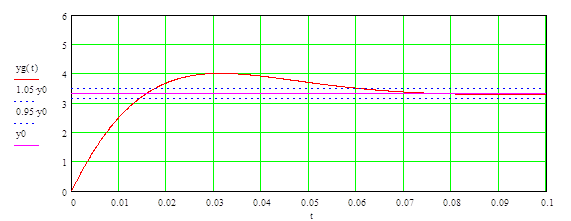
Рис. 3.14.1. Переходная характеристика скорректированной САУ
Похожие работы
... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
0 комментариев