Навигация
Анализ процесса регулирования непрерывной системы. Анализ процесса управление цифровой системы и синтез передаточной функции корректирующего цифрового устройства управления
10243
знака
9
таблиц
16
изображений
ВСТУПЛЕНИЕ
Курсовая работа по теории автоматического управления (ТАУ) ставит цель освоения методов анализа и синтеза непрерывной и цифровой систем автоматического регулирования (САР). Для этого в курсовую работу включенные такие традиционные вопросы как определения передаточной функции системы по ее структурной схеме, определение состояния стойкости системы, определение показателей качества переходного процесса системы, расчет и построение частотных характеристик системы, расчет точности управление, коррекция системы и синтез электрической схемы корректированного устройства. Для расчета системы автоматического регулирования в задаче на курсовую работу заданные значения параметров всех ее нивка и допустимые значения показателей качества регулирования, которые удовлетворят требованиям к качеству переходного процесса, устойчивости и точности регулирования.
В первой части курсовой работы выполняется анализ процесса регулирования непрерывной системы. Сначала рассчитывается некорректированная система. Для нее рассчитываются значение регламентированных показателей качества управление, которые сравниваются с заданными допустимыми значениями. Поскольку некоторые из рассчитанных параметров не удовлетворяют поставленным требованиям, принимается решение о необходимости коррекции. В курсовой работе (КР) выполняется последовательная коррекция, определяются передаточная функция и параметры корректирующего устройства, а также синтезируется его электрическая схема и рассчитываются значения элементов схемы. Коррекция должна улучшить определенные показатели системы регулирование. Для того, чтобы убедиться в этом и количественно оценить эффект коррекции предполагается контрольный расчет параметров корректированной системы.
В второй части курсовой работы выполняется анализ процесса управление цифровой системы и синтез передаточной функции корректирующего цифрового устройства управления. Для этого сначала рассчитывается дискретная передаточная функция цифрового аналога непрерывной некорректированной системы. Для цифровой системы рассчитываются такие же параметры, как и для непрерывной, после чего выполняется цифровая коррекция системы и контрольный расчет показателей корректированной системы.
1. СТРУКТУРНАЯ СХЕМА И ПЕРЕДАТОЧНАЯ ФУНКЦИЯ НЕПРЕРЫВНОЙ САР
Рассмотрим этот вопрос на примере варианту задача, приведенного в прибавлении 1. Из описания системы нетрудно установить, что фазовый детектор моделируется инерционным звеном с передаточной функцией (ПФ)  интегрирующее устройство – идеальным интегрирующим звеном с ПФ W1(s) =
интегрирующее устройство – идеальным интегрирующим звеном с ПФ W1(s) = ![]() , усилитель – пропорциональным звеном с ПФ Wп (s) = k0, управляемый электронный генератор – инерционным звеном с ПФ Wкг(s)=
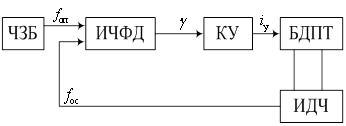
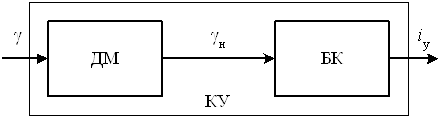
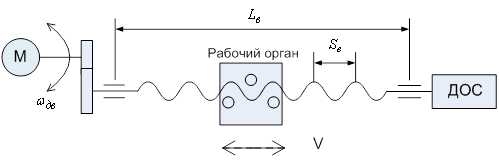
, усилитель – пропорциональным звеном с ПФ Wп (s) = k0, управляемый электронный генератор – инерционным звеном с ПФ Wкг(s)=![]() . Структурная схема заданной системы показанная на рис.1.1.
. Структурная схема заданной системы показанная на рис.1.1.
|
|
|
|
u(t) є(t) x(t)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.1.1. Структурная схема заданной системы
или в виде
![]() ,
,
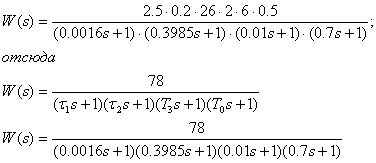
где ![]() - общий коэффициент усиления.
- общий коэффициент усиления.
Передаточная функция замкнутой системы
 .
.
 |
Определим коэффициенты а0,а1,а2,а3,b0.
Похожие работы

... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... вариант To ko T1 T2 kc kв kQ kП ky T3 k3 ν σ c c c c % % 4-9 0.7 6 0.4 0.025 2.5 0.5 200 0.13 0.2 26 0.01 2 2 5 Введение Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев