Навигация
РАСЧЕТ И ПОСТРОЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК СИСТЕМЫ
10243
знака
9
таблиц
16
изображений
4. РАСЧЕТ И ПОСТРОЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК СИСТЕМЫ
Передаточную функцию разомкнутой части системы можно записать в виде:
Заменяя в предыдущей формуле s на јω получим выражение для частотной передаточной функции звена:
Для заданной системы получим:

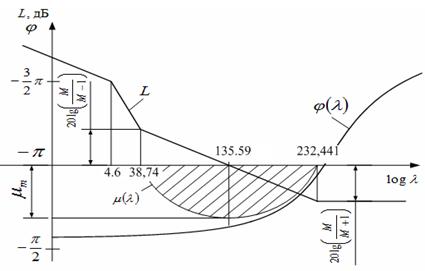
Фазо-частотную характеристику определяем как аргумент передаточной функции разомкнутой системы:
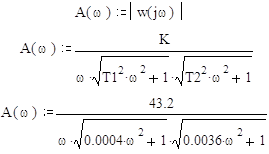 |
Амплитудно-частотную характеристику определяем как модуль передаточной функции разомкнутой системы:
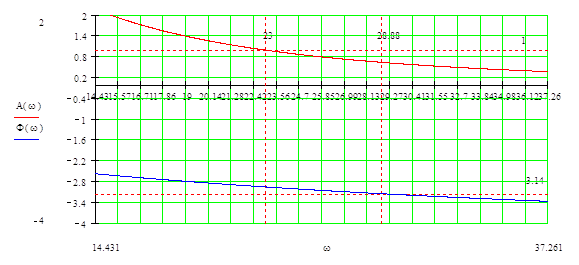 |
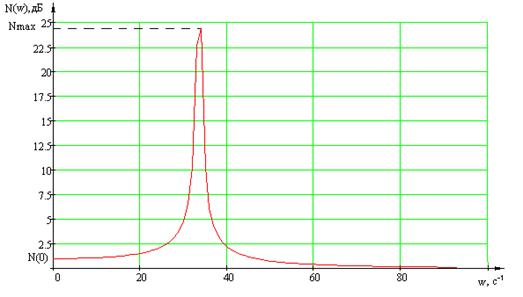
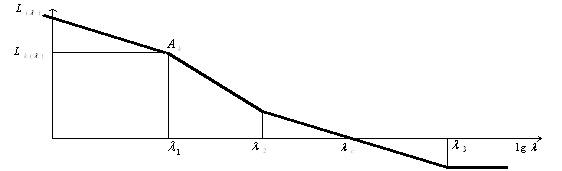
Рис.4 Графики АЧХ и ФЧХ (определение запасов устойчивости).
| | 15 | 17 | 19 | 21 | 23 | 25 | 27 | 28.88 | 31 | 33 |
| A() | 2.05 | 1.679 | 1.399 | 1.1769 | 1 | 0.86 | 0.739 | 0.65 | 0.56 | 0.5 |
| | -2.595 | -2.694 | -2.784 | -2.869 | -2.945 | -3.018 | -3.08 | -3.14 | -3.2 | -3.257 |
По графику определяем частоту среза- с,частоту .На частоте с определяем запас устойчивости по фазе-,на частоте запас устойчивости по амплитуде-А:
wp=28,88
wс=23
DА=1-0.65=0.35
Df=3,14-2,869=0,271
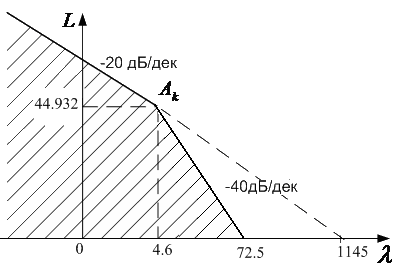
Рассчитав АЧХ не трудно найти выражение для логарифмической амплитудно-частотной характеристики:
АL(w)=20lgA(w)
 |
Рис.5 График ЛАЧХ.
| | 17 | 19 | 21 | 23 | 25 |
| АL | 4.52 | 2.93 | 1.437 | 0 | -1.345 |
Рассчитанные ЧХ А(w), j(w) и AL(w) для разомкнутой системы используются для расчета соответствующих характеристик Аз(w), jс(w) и ALз(w) замкнутой системы.
![]()
 ,
,
![]() ,
,
![]()
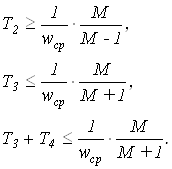
Рис.6 График АЧХ замкнутой системы.
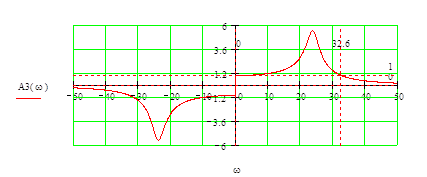 |
| w | 0 | 10 | 15 | 20 | 23.8 | 26 | 30 | 32.6 | 40 |
| Aз(w) | 1 | 1.2 | 1.58 | 2.826 | 5.46 | 3.619 | 1.5 | 1 | 0.46 |
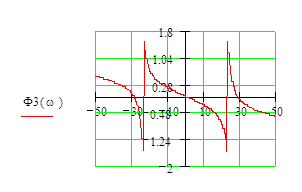
Рис.7 График ФЧХ замкнутой системы.
| w | -50 | -28.9 | -23.3 | -23.2 | -16 | 0 | 16 | 23.2 | 23.3 | 28.9 | 50 |
| фз() | 0.56 | 0 | -1.54 | 1.55 | 0.45 | 0 | -0.46 | -1.55 | 1.54 | 0 | -0.56 |
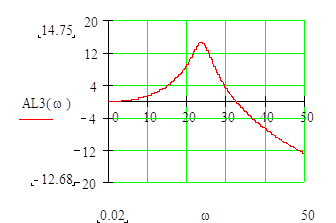 |
Рис.8 График ЛАЧХ замкнутой системы.
| w | 0 | 10 | 20 | 23.76 | 30 | 32.65 | 40 |
| AL3() | 0 | 1.52 | 9 | 14.74 | 3.48 | 0 | -6.65 |
Похожие работы

... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... вариант To ko T1 T2 kc kв kQ kП ky T3 k3 ν σ c c c c % % 4-9 0.7 6 0.4 0.025 2.5 0.5 200 0.13 0.2 26 0.01 2 2 5 Введение Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев