Навигация
РАСЧЕТ ТОЧНОСТИ РАБОТЫ НЕПРЕРЫВНОЙ САР
10243
знака
9
таблиц
16
изображений
5. РАСЧЕТ ТОЧНОСТИ РАБОТЫ НЕПРЕРЫВНОЙ САР
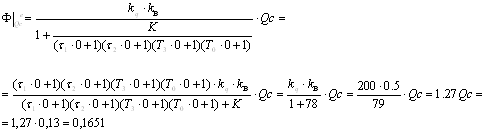
Точность регулирования системы можно оценивать коэффициентами ошибок. В данной КР для заданной системы нужно вычислить коэффициенты ошибок С0, С1, С2, где С0 – коэффициент статической ошибки, С1 – коэффициент скоростной ошибки, С2 – коэффициент ошибки, обусловленной ускорением входного управляющего действия u(t).
Коэффициенты ошибок рассчитывают по формулегде Фe(s) = 1/[1+W(s)] – передаточная функция системы относительно ее ошибки e(t).
 |
Исходя из общей формулы получим:
Значение коэффициента скоростной ошибки не удовлетворяет заданным условиям.
6. КОРРЕКЦИЯ НЕПРЕРЫВНОЙ СИСТЕМЫ
Качество процесса управление определяется показателями, которые характеризуют стойкость системы, переходный процесс системы и точность ее управления. Сравнивая рассчитанные в разделе 3 показатели качества переходного процесса th и s с соответствующими заданными значениями этих показателей, нетрудно заметить, что рассчитанная система не удовлетворяет заданным требованиям. Поэтому с помощью коррекции системы попробуем улучшить упомянутые показатели, не ухудшая при этом других показателей ( ∆А, ∆φ, С0, С1 и С2).
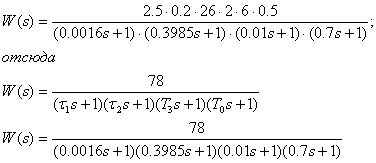
В курсовой работе можно применить временной метод последовательной коррекции типичными корректирующими звеньями. На основе анализа влияния типичного корректирующего звена и на динамику системы [1-3] выбирают звено, которое в заданной системе может дать положительный эффект. К варианту заданной в приложении 1 системы с целью уменьшения продолжительности переходного процесса и величины перерегулирования можно применить для коррекции форсирующее звено с передаточной функцией WК(s) = t s +1. После включения корректирующего звена передаточная функция W(s) разомкнутой части корректированной системы будет иметь вид
![]() ,.
,.
а ПФ замкнутой корректированной системы будет иметь вид
 ,
,
где b0 = t, b1 = 1, a0 = Т1×Т2, a1 =( Т1 + Т2), a2 = (1 + kt), a3 = k.
Для заданной системы наиболее подходящим является значение =0,03.
7. КОНТРОЛЬНЫЙ РАСЧЕТ ПАРАМЕТРОВ СКОРРЕКТИРОВАННОЙ СИСТЕМЫ
Рис.9 График скорректированной системы.
 |
По графику видно, что благодаря включению корректирующего звена время переходного процесса – tп уменьшилось до 0,162с, а значение h(t)max=1.123.Следовательно значение величины перерегулирования уменьшилось
до s=12,3%.Эти значения удовлетворяют заданному условию.
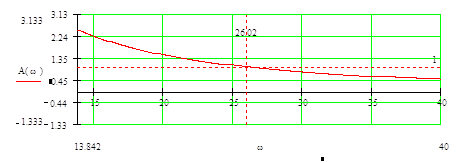
 |
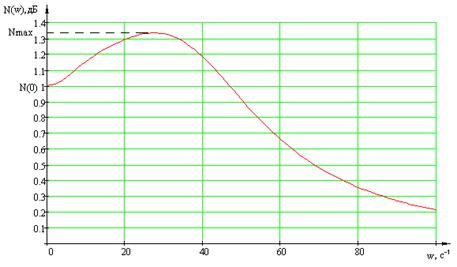
По графику А(w) скорректированной системы видно, что частота среза увеличилась - wс=26,02.При этой частоте запас устойчивости по фазе Df=0,74.
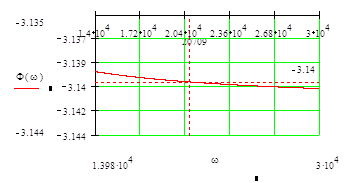 |
Рис.11 Запас устойчивости по фазе.
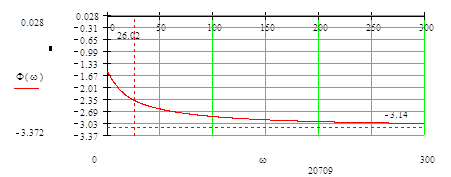
Рис.12 График ФЧХ скорректированной системы.
 |
Частота wp увеличилась до wp=20709. Запас устойчивости по амплитуде DA=1.
 |
Рис.13 Запас устойчивости по амплитуде.
Рассчитаем коэффициенты ошибок скорректированной системы:
Рассчитаем коэффициенты ошибок скорректированной системы:
Сравнительная таблица показателей качества непрерывной системы:
| Допустимые значения | Некорректированная система | Скорректированная система | |
| tп,с | 0.6 | 1,2 | 0.162 |
| σ, % | 15 | 71 | 12,3 |
| ΔΑ | 0.2 | 0.35 | 1 |
| Δφ,град. | 10 | 15,5 | 42,4 |
| С0 | 0.01 | 0 | 0 |
| С1 | 0.02 | 0.023 | 0.023 |
| С2 | 0.01 | 0.00263 | 0.00124 |
Похожие работы

... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... вариант To ko T1 T2 kc kв kQ kП ky T3 k3 ν σ c c c c % % 4-9 0.7 6 0.4 0.025 2.5 0.5 200 0.13 0.2 26 0.01 2 2 5 Введение Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев