Навигация
ОПРЕДЕЛЕНИЕ СОСТОЯНИЯ УСТОЙЧИВОСТИ СИСТЕМЫ
10243
знака
9
таблиц
16
изображений
2. ОПРЕДЕЛЕНИЕ СОСТОЯНИЯ УСТОЙЧИВОСТИ СИСТЕМЫ
Состояние устойчивости системы можно определить по корням ее характеристического уравнения. Система, как известно, устойчивая, если все действительные корни отрицательные, а комплексные корни имеют отрицательную действительную часть. При этом апериодический запас устойчивости определяется наименьшим расстоянием к нулю действительных корней, а колебательный запас – наименьшим расстоянием действительной частей комплексных корней. В теории автоматического управления широкого применения приобрели также методы определения состояния устойчивости, которые не требуют решения характеристического уравнения. Их называют критериями устойчивости. Одним из них есть критерий Гурвица, который дает возможность определить состояние устойчивости системы непосредственно по коэффициентам характеристического уравнения.
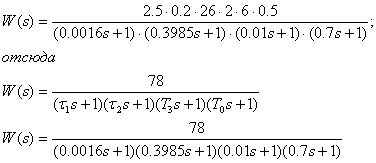
Характеристический многочлен системы – это знаменатель ее передаточной функции. Поэтому характеристическое уравнение заданной системы имеет такой вид:
![]() .
.
 |
Для решения этого уравнения воспользуемся программой MathCad:
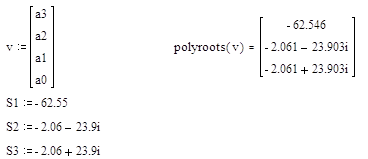 |
Как видно из решения, действительный корень этого уравнения отрицательный, и действительные части комплексных корней также отрицательные.
Следовательно, система устойчивая.
Определим апериодический и колебательный запасы устойчивости.
![]()
a
![]()
![]()
![]()
![]()
Рис.1![]()
![]()
Т.к. апериодический запас устойчивости равен расстоянию до нуля действительного корня, то он равен а1= -62,55. Колебательный запас равен расстоянию до нуля действительной части комплексных корней, следовательно а2,3= -2,06
3. ИССЛЕДОВАНИЕ ПЕРЕХОДНОГО ПРЦЕССА НЕПРЕРЫВНОЙ СИСТЕМЫ
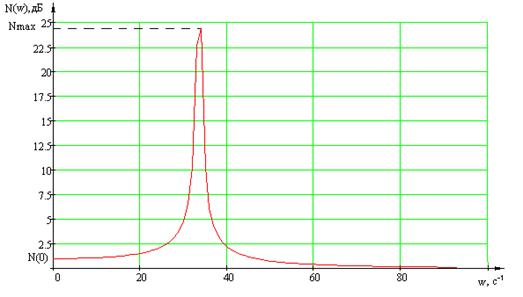
Как известно, изображение по Лапласу переходной характеристики (ПХ) h(t) определяется таким общим выражением
![]() ,
,
где B(s) и A(s) – в общем случае многочлены соответственно числителя и знаменателя изображения. Функция h(t) имеет вид:
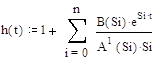
B(Si)=K=43,2
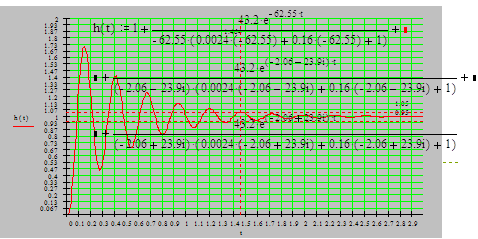
Рис.2 График переходной характеристики
| t | 0,147 | 0,279 | 0,411 | 0,543 | 0,675 | 0,81 | 0,873 | 0,936 |
| h(t) | 1,71 | 0,458 | 1,4132 | 0,68494 | 1,24 | 0,82 | 1 | 1,1399 |
| t | 1,005 | 1,071 | 1,137 | 1,2 | 1,266 | 1,332 | 1,398 | 1,464 |
| h(t) | 1 | 0,894 | 1 | 1,08 | 1 | 0,94 | 1 | 1,047 |
На графике видно, что время переходного процесса tp = 1,464 мс,h(t)max= 1.71,
σ=(1.71-1)*100%= 71%
Эти значения не удовлетворяют заданным условиям и подлежат корректированию.
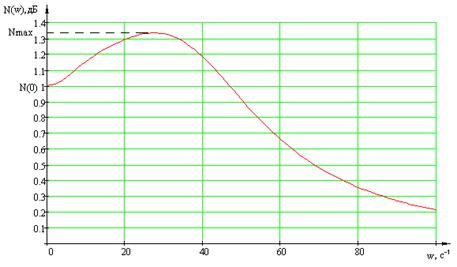
Построим график функции g(t) – импульсной характеристики системы:
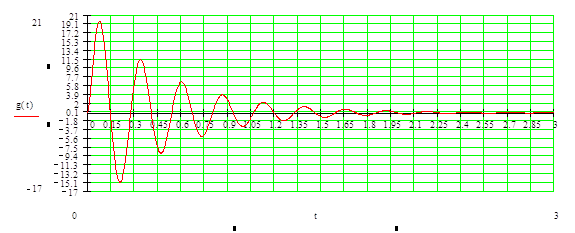
Рис.3 График импульсной характеристики системы.
Похожие работы

... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... вариант To ko T1 T2 kc kв kQ kП ky T3 k3 ν σ c c c c % % 4-9 0.7 6 0.4 0.025 2.5 0.5 200 0.13 0.2 26 0.01 2 2 5 Введение Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев