Науково-дослідні космічні апарати
Навігаційні ШСЗ
Супутники для вивчення земних ресурсів
Космічні апарати для міжпланетних польотів
Космічна зйомка поверхні Землі
Космічні системи моніторингу
Формування системи моніторингу на базі сонячно-сінхронних орбіт
Ймовірна оцінка впливу хмарності
Результати розрахунків ймовірності зйомки
Землекористування, природоохоронні та природоресурсні задачі
Визначення техногенних змін сучасних ландшафтів
Картування ділянок підвищеної природної пожежобезпечності
Ракетно-космічні комплекси
Вплив ракетно-космічної техніки на озоновий шар Землі
Космічне сміття
Функціональне призначення галузевої системи комплексної обробки аерокосмічної та наземної інформації (ГІСКОАНІ)
Вимоги до функціонування системи моніторингу
Паспорт АКП та його структура
Системи дистанційного зондування Землі
Лазерні системи
Лідар на основі реєстрації диференційного поглинання
Лідар на основі реєстрації флуоресценції
Питання з розділу ІІ
Навигация
Навігаційні ШСЗ
Дистанційний екологічний моніторинг
145033
знака
13
таблиц
42
изображения
1.4 Навігаційні ШСЗ
Орбітальна система з навігаційних ШСЗ, що розроблена у США, в сукупності з наземною системою забезпечення та бортовою апаратурою об’єктів, що визначаються у наш час використовується для встановлення місця об’єкта в заданій системі координат у будь-який час доби, за будь-яких метеоумов та необмеженій пропускній здатності. За опорну радіонавігаційну величину (орієнтир з відомими координатами на даний момент часу) використовується задана у часі й просторі з певною точністю траєкторія руху супутника. Траєкторія ШСЗ в часі задається ефемеридами, що періодично обновлюються у системі єдиного часу. Значення ефемерид вводяться разом із сигналами точного часу від бортового датчика. Траєкторії руху ШСЗ також можна обирати із спеціальних каталогів, подібних до астрономічних для ефемерид.
В залежності від методів вимірювання параметрів, що характеризують відносне положення ШСЗ та об’єкта, що визначається, розрізняють декілька способів визначення місцеположення об’єкта:
дальномірний;
кутомірний;
дальномірно-кутомірний;
доплеровський.
Перші три способи через малу точність вимірювань практично не використовуються.
В допплерівських системах для визначення величини зміщення![]() точки стояння об'єкта відносно сліду траєкторії супутника на земній поверхні - курсового параметра ШСЗ (рис. 1.8) - використовуються вимірювання допплерівського зсуву частоти
точки стояння об'єкта відносно сліду траєкторії супутника на земній поверхні - курсового параметра ШСЗ (рис. 1.8) - використовуються вимірювання допплерівського зсуву частоти ![]() сигналів, що випромінюються бортовим передавачем:
сигналів, що випромінюються бортовим передавачем:
![]()
де ![]() - радіальна складова швидкості ШСЗ;
- радіальна складова швидкості ШСЗ; ![]() - швидкість світла.
- швидкість світла.
Для визначення координат точки стояння об'єкта достатньо визначити величину курсового параметра ![]() супутника, текучі координати і параметри руху якого відомі на момент проходження точки
супутника, текучі координати і параметри руху якого відомі на момент проходження точки ![]() .
.
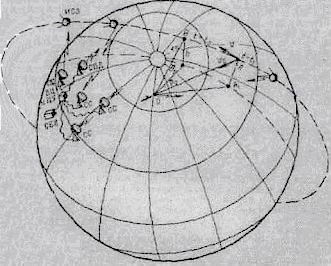
Рис.1.8. Схема побудови навігаційної системи з використанням ШСЗ: О – об’єкт, що визначається; СС – станція супроводження ШСЗ; СВД – станція введення даних; СЕВ – станція еталонної частоти та єдиного часу; ВЦ та ЦУ – обчислювальний центр та центр управління; ![]() - курсовий параметр ШСЗ;
- курсовий параметр ШСЗ; ![]() - радіальна складова ШСЗ
- радіальна складова ШСЗ
Якщо прийняти, що ділянка АВ траєкторії ШСЗ прямолінійна і лінійна швидкість супутника ![]() на цій ділянці стала, то в кожний момент часу
на цій ділянці стала, то в кожний момент часу ![]()
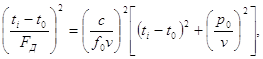
де ![]() - момент часу проходження ШСЗ курсового параметра (
- момент часу проходження ШСЗ курсового параметра (![]() ).
).
Для точності навігації необхідно враховувати також рефракцію радіохвиль в іоносфері. У зв'язку з цим допплерівський зсув вимірюється не менше ніж на двох частотах. За характеристиками розповсюдження радіохвиль на двох сполучених частотах визначається поправка на рефракцію.
Допплерівська система, яка є пасивною, забезпечує необмежену пропускну здатність.
Характеристики орбітальної системи навігаційних ШСЗ зумовлюються необхідною максимальною частотою визначення місця положення об'єкту, заданим часом активного існування ШСЗ, можливостями встановлення зв'язку між об'єктом, що визначається та ШСЗ (характеристиками радіотехнічної апаратури, енергетичними ресурсами на борту ).
Для навігаційних ШСЗ найбільш бажані полярні кругові орбіти, через те, що вони охоплюють усю поверхню Землі, розрізняються більшою стабільністю, для них простіше ніж для еліптичних розраховувати ефемериди та враховувати вплив збурюючих дій. Висота орбіти зазвичай близько 1000 км. Для, визначення об'єктом у довільній точці Землі свого місцеположення) в орбітальній системі координат не рідше ніж через кожні 100-120 хвилин мають бути не менше чотирьох супутників, які обертаються по круговим полярним орбітам. Площини орбіт (висхідні вузли) в просторі мають бути рознесені на 45°. При цьому вважається, що з кожним супутником об'єкт, що визначається, може підтримувати зв'язок на двох-трьох сусідніх витках (у межах видимості).
1.5 Геодезичні ШСЗ
Геодезичні ШСЗ призначені для вирішення геометричних та динамічних (фізичних) задач геодезії.
Геометричні задачі зводяться до визначення положення точок на земній поверхні та встановлення точних геодезичних зв’язків поміж континентами та відособленими об'єктами (наприклад, островами) з метою приведення їх до єдиної системи координат, прив'язки з високою точністю окремих пунктів до мережі тріангуляції (створення глобальної геодезичної мережі та її ущільнення), визначення точних координат окремих пунктів на земній поверхні, забезпечення картографування.
Динамічні задачі приводяться до уточнення форми, розмірів і гравітаційного поля Землі, встановлення її справжньої форми, визначення потенціалів гравітаційного поля та гравітаційних аномалій, а також встановлення законів їхніх змін. Так, за допомогою обробки орбітальних вимірювань у наш час визначено коефіцієнта при членах розкладення у ряд гравітаційного потенціалу Землі до 14 – го порядка.
Спеціальні геодезичні ШСЗ використовуються як опорні точки, тобто точки з точно відомими на даний момент координатами. У залежності від методу задавання координат текучого місця положення ШСЗ розрізняють два способи розв’язання геометричних задач. При першому способі використовуються дані точного прогнозування орбіт ШСЗ (як це робиться під час навігаційних визначень з використанням ШСЗ); при другому способі координати текучого місця положення ШСЗ визначаються вимірюваннями з декількох наземних пунктів (кутомірних або дальномірних), координати яких відомі. Перший спосіб дозволяє провести геодезичну прив’язку будь-яких пунктів, устаткованих необхідним обладнанням. Однак досягнуті в наш час точності прогнозування орбіт (декілька десятків метрів) усе ще не придатні для геодезії. На практиці використовується другий спосіб, який може використовуватися для взаємної прив’язки пунктів, відносно яких супутник протягом визначеного часу знаходиться одночасно в зоні видимості. Цей спосіб можна реалізувати на базі використання оптичних кутомірних та радіотехнічних (дальномірних, допплерівських і кутомірно-дальномірних) систем для вимірювання місцеположення ШСЗ з наземних пунктів.
Для оптичних кутомірних вимірювань місця положення ШСЗ супутники устатковуються бортовими імпульсними джерелами світла (оптичними маяками) або використовуються для відбиття сигналів оптичних квантових генераторів наземних станцій. З метою забезпечення високої точності кутомірних вимірювань (±1-2") на наземних пунктах використовуються спеціальні високоточні фототеодолітні установки з наступною обробкою компаратором отриманих фотографічних зображень ШСЗ на фоні зірок. Висока точність забезпечується також фіксацією часу вимірювань, який
задається бортовим еталоном. Сигнали єдиного часу передаються по радіолініям орбітальних вимірювань.
В радіотехнічних далекомірних системах використовуються радіолокаційні вимірювання дальності з декількох сполучених пунктів, для чого на борту геодезичного ШСЗ встановлюється до чотирьох приймачів та передавачів (згідно кількості сполучених пунктів), які працюють на різних частотах. Як і при кутомірних методах, моменти вимірювань фіксуються в часі за сигналами бортового еталону часу.
Орбіти геодезичних ШСЗ мають бути наближеними до кругових на висоті 1000-1400 км (ШСЗ з оптичним маяком) або кругові на висоті близько 1000 км (ШСЗ з радіотехнічною апаратурою для далекомірних вимірювань).
Похожие работы
... змінах клімату; — виявлення природних i антропогенних факторів, що зумовлюють зміну клімату; — виявлення критичних елементів біосфери, вплив на які може спричинити клiматичнi зміни. Розділ 3. Моніторинг поверхневих вод Вода вiдiграє вирішальну роль у пiдтриманнi життя людини. Її наявнiстъ i способи використання нерідко визначають долі народів i країн. Особливої гостроти набуває ця ...
... з рубежами фізико-географічного районування. Вірогідність екстраполяції тим вище, ніж ближче в класифікаційній системі й у сітці районування лежать ландшафти-аналоги. 4. Організація ландшафтного моніторингу заповідних територій У межах Центрального Чернозем`я знаходиться сім державних заповідників: Воронезький (площею 31,1 тис. га), Хоперский (16,2 тис. га), Центрально-Чорноземний (4,9 тис. ...
... уполя, Донецька. Машинобудівна промисловість має багатогалузеву структуру (важке, електротехнічне, радіоелектронне, транспортне машинобудування, приладо-, верстатобудування й т. д. ), і кожній із галузей притаманні свої екологічні особливості: * Енергетика. В Україні ТЕС виробляють приблизно 55—60 % електроенергії (близько 37, 6 тис. МВт); майже всі вони розташовані в містах і є найбільшими серед ...
... по приватизації державного майна. Умовами приватизаційних конкурсів не передбачався встановлений рівень екологічної безпеки об'єкта, що здобувається. Таким чином, виникає погроза економії на екологічних витратах. На жаль, законодавство ще недостатньо підготовлене до рішення природоохоронних завдань у специфічних умовах переходу до ринкових відносин. Відносно нова проблема - екологічна регламентац ...
0 комментариев