Побудова планів швидкостей
Побудова планів прискорень
Побудова кінематичних діаграм для крапки В
Силовий розрахунок групи Ассура, що складає з ланок 4 і 5
Силовий розрахунок початкової ланки
Дослідження руху механізму й визначення моменту інерції маховика
Визначення наведених моментів інерції механізму
Проектування кулачкового механізму
Побудова профілю кулачка коромислового кулачкового механізму
Проектування евоволентного зачеплення прямозубих циліндричних коліс
Навигация
Побудова планів швидкостей
Кінематичний аналіз плоских важільних, кулачкових і зубчастих механізмів
39583
знака
6
таблиц
7
изображений
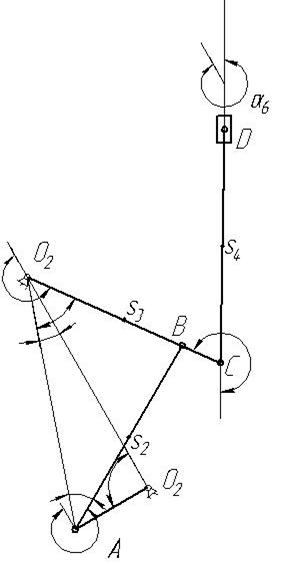
2.2 Побудова планів швидкостей
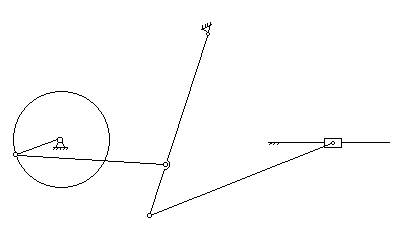
Визначення швидкостей, зазначених на кінематичній схемі крапок ланок механізму робимо методом планів у послідовності, певною формулою будови механізму. Спочатку визначаємо лінійну швидкість провідних крапок А и С.
VA= w1× lOA= ![]() × lOA
× lOA
VС= w1× lOC= ![]() × lOС
× lOС
де w1 - кутова швидкість початкової ланки ОА;
n1 – частота обертання початкової ланки ОА;
lOA – довжина ланки ОА, м;
w1= ![]()
VA= VС = ![]()
Швидкості крапок А и B буде однаковими для всіх положень механізму. Масштабний коефіцієнт плану швидкостей вибираємо стандартним. У розглянутому прикладі
![]()
![]()
Вектор ![]() перпендикулярний кривошипу ОА й спрямований убік його обертання.
перпендикулярний кривошипу ОА й спрямований убік його обертання.
Відповідно до першого рівняння, через крапку а на плані швидкостей проводимо пряму, перпендикулярну АВ, а відповідно до другого – через крапку р проводимо пряму, паралельну напрямної X–X. Перетинання цих прямих визначає положення крапки c, що зображує кінець вектора VВ і V В. Із плану швидкостей маємо
VВ= VВВo= (pb).![]()
![]() = 33,5 × 0,4 = 13,4 м/c
= 33,5 × 0,4 = 13,4 м/c
V В= (ab).![]()
![]() = 45 × 0,4 = 18 м/с
= 45 × 0,4 = 18 м/с
Швидкість центра мас S2 ланки 2 визначимо по теоремі подоби:
![]() ,
,
звідки ![]()
Отже,
![]()
Швидкості крапок, що належать групі Ассура з ланками 2,3 визначені.
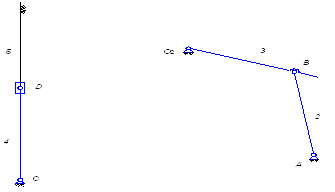
Переходимо до побудови плану швидкостей для групи 4,5. Розглянемо рух крапки D щодо крапки З, а потім стосовно крапки D0, що належить нерухливої напрямної (![]() ). Запишемо два векторних рівняння, які вирішимо графічно:
). Запишемо два векторних рівняння, які вирішимо графічно:

Відповідно до першого рівняння через крапку із плану швидкостей проводимо пряму, перпендикулярну до DС, а для рішення другого рівняння необхідно через полюс p провести пряму, паралельну напрямної X–X. На перетинанні цих прямих і буде перебувати шукана крапка d.
Величини швидкостей визначимо, множачи довжини векторів на плані швидкостей на масштабний коефіцієнт ![]()

Швидкість центра мас S4 ланки 4 визначимо по теоремі подоби
 ,
,
звідки 
Отже,
![]()
У зазначеній послідовності виробляється побудова планів швидкостей для всіх 12-ти положень механізму. Причому, вектори, що виходять із полюса P, зображують абсолютні швидкості, а відрізки з'єднуючі кінці цих векторів – відносні швидкості крапок.
Обчислені в такий спосіб величини швидкостей зводимо в таблицю 2.1.
Визначимо кутові швидкості ланок


![]()
Напрямок кутової швидкості ланки AВ визначиться, якщо перенести вектор ![]() швидкості крапки B на схемі механізму й установити напрямок обертання ланки AB щодо крапки А під дією цього вектора. У розглянутому випадку в положенні 1 механізму кутова швидкість
швидкості крапки B на схемі механізму й установити напрямок обертання ланки AB щодо крапки А під дією цього вектора. У розглянутому випадку в положенні 1 механізму кутова швидкість ![]() спрямована проти годинникової стрілки.
спрямована проти годинникової стрілки.
Напрямок кутової швидкості шатуна 4 визначає вектор ![]() , якщо його перенести із плану швидкостей у крапку D на схемі механізму. У положенні 1 кутова швидкість
, якщо його перенести із плану швидкостей у крапку D на схемі механізму. У положенні 1 кутова швидкість ![]() спрямована проти годинникової стрілки.
спрямована проти годинникової стрілки.
Таблиця 2.1
| № | VО | VА | VB | VS2 | VС | VD | VS4 | VВА | VDС | ω1 | ω2 | ω4 |
| м/з | с-1 | |||||||||||
| 0 | 0 | 20,8 | 0 | 14 | 20,8 | 20,8 | 20,8 | 20,8 | 0 | 188,4 | 60,03 | 0 |
| 1 | 0 | 20,8 | 13,4 | 16,6 | 20,8 | 21,2 | 20,4 | 18 | 10,8 | 188,4 | 51,95 | 31,17 |
| 2 | 0 | 20,8 | 21,2 | 20,4 | 20,8 | 13,4 | 16,6 | 10,8 | 18 | 188,4 | 31,17 | 51,95 |
| 3 | 0 | 20,8 | 20,8 | 20,8 | 20,8 | 0 | 0 | 0 | 20,8 | 188,4 | 0 | 60,03 |
| 4 | 0 | 20,8 | 15 | 18,2 | 20,8 | 13,4 | 16,6 | 10,8 | 18 | 188,4 | 31,17 | 51,95 |
| 5 | 0 | 20,8 | 7,6 | 15,6 | 20,8 | 21,2 | 20,4 | 18 | 10,8 | 188,4 | 51,95 | 31,17 |
| 6 | 0 | 20,8 | 0 | 14 | 20,8 | 20,8 | 20,8 | 20,8 | 0 | 188,4 | 60,03 | 0 |
| 7 | 0 | 20,8 | 7,6 | 15,6 | 20,8 | 15 | 18,4 | 18 | 10,8 | 188,4 | 51,95 | 31,17 |
| 8 | 0 | 20,8 | 15 | 18,2 | 20,8 | 7,6 | 14,8 | 10,8 | 18 | 188,4 | 31,17 | 51,95 |
| 9 | 0 | 20,8 | 20,8 | 20,8 | 20,8 | 0 | 0 | 0 | 20,8 | 188,4 | 0 | 60,03 |
| 10 | 0 | 20,8 | 21,2 | 20,4 | 20,8 | 7,6 | 14,8 | 10,8 | 18 | 188,4 | 31,17 | 51,95 |
| 11 | 0 | 20,8 | 13,4 | 16,6 | 20,8 | 15 | 18,4 | 18 | 10,8 | 188,4 | 51,95 | 31,17 |
Похожие работы
... додатку 1, рисунок 1[14], вариант 5. О2 3 1 О15 А 2 В Д 4 С Рис 1.1.Механізм важіля Механізм важіля складається з п’яти ланок, де ланка ...
0 комментариев