Побудова планів швидкостей
Побудова планів прискорень
Побудова кінематичних діаграм для крапки В
Силовий розрахунок групи Ассура, що складає з ланок 4 і 5
Силовий розрахунок початкової ланки
Дослідження руху механізму й визначення моменту інерції маховика
Визначення наведених моментів інерції механізму
Проектування кулачкового механізму
Побудова профілю кулачка коромислового кулачкового механізму
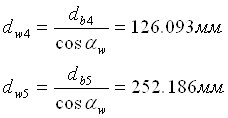
Проектування евоволентного зачеплення прямозубих циліндричних коліс
Навигация
Дослідження руху механізму й визначення моменту інерції маховика
Кінематичний аналіз плоских важільних, кулачкових і зубчастих механізмів
39583
знака
6
таблиц
7
изображений
3.7 Дослідження руху механізму й визначення моменту інерції маховика
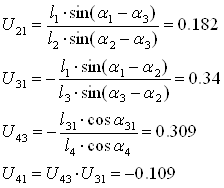
Тому що усередині циклу усталеного руху машини не спостерігається рівності роботи рушійних сил і роботи сил опору й сталості наведеного моменту інерції механізму, те кутова швидкість (провідної ланки виявляється змінною. Величина коливань цієї швидкості оцінюється коефіцієнтом нерівномірності ходу
де wmax – максимальна кутова швидкість;
wmin – мінімальна кутова швидкість;
wср. – середня кутова швидкість.
За середню кутову швидкість можна прийняти номінальну швидкість ![]() .
.
Коливання швидкості провідної ланки механізму повинна регулюватися в заздалегідь заданих межах. Це регулювання звичайно виконується відповідним підбором мас ланок механізму. Маси ланок механізму повинні підбиратися так, щоб вони могли накопичувати (акумулювати) всі збільшення кінетичної енергії при перевищенні роботи рушійних сил над роботою сил опору.
Роль акумулятора кінетичної енергії механізму звичайно виконує маховик. Тому в наше завдання входить підібрати масу маховика такий, щоб даний механізм міг здійснити роботу із заданим коефіцієнтом нерівномірності руху ![]() .
.
Для розрахунку маховика скористаємося методом енергомас. По цьому методі момент інерції маховика визначається по діаграмі енергомас, що характеризує залежність збільшення кінетичної енергії механізму від наведеного моменту інерції механізму.
Тому що збільшення кінетичної енергії дорівнює різниці роботи рушійних сил і роботи сил опору, то для побудови цієї діаграми необхідно побудувати спочатку діаграми наведених моментів рушійних сил і сил опору.
Наведений до провідної ланки момент сил для кожного положення досліджуваного механізму.
![]()
Для розрахункового 2-го положення:
![]()
Розрахунок наведеного моменту рушійних сил для інших положень механізму зводимо в таблицю 3.1
Таблиця 3.1-результати розрахунку наведеного моменту рушійних сил
| № |
|
|
|
|
|
| 0 | 153860 | 0 | -4615,8 | 20,8 | -509,6 |
| 1 | 107702 | 13,4 | -15386 | 21,2 | 5929 |
| 2 | 40003,6 | 21,2 | -49235,2 | 13,4 | 999,6 |
| 3 | 15386 | 20,8 | 153860 | 0 | 1698,7 |
| 4 | 10770,2 | 15 | 104624,8 | 13,4 | 8299 |
| 5 | 9231,6 | 7,6 | 55389,6 | 21,2 | 6605,2 |
| 6 | 7693 | 0 | 18463,2 | 20,8 | 2038,4 |
| 7 | 0 | 7,6 | 12308,8 | 15 | 980 |
| 8 | 0 | 15 | 9231,6 | 7,6 | 372,4 |
| 9 | -3077,2 | 20,8 | 7693 | 0 | -339,7 |
| 10 | -13847,4 | 21,2 | 0 | 7,6 | -1558,2 |
| 11 | -49235,2 | 13,4 | 0 | 15 | -3501,9 |
На підставі дані таблиці будуємо діаграму зміни Мд рушійних сил у функції кута повороту початкової ланки. Масштаб по осі ординат вибираємо ![]() , масштаб по осі абсцис при довжині діаграми l=180 мм
, масштаб по осі абсцис при довжині діаграми l=180 мм
![]()
Тому що робота рушійних сил
 ,
,
те графічним інтегруванням діаграми наведених моментів рушійних сил будуємо діаграму робіт рушійних сил. Масштаб по осі ординат визначається по формулі
![]()
де Н – полюсна відстань, рівне 50 мм.
За один цикл усталеного руху (у нашім випадку один оберт провідної ланки) робота рушійних сил дорівнює роботі сил опору.
Приймемо постійним наведений момент сил опору(![]() ) Тоді робота сил опору
) Тоді робота сил опору  , являє собою лінійну функцію кута повороту провідної ланки. З'єднавши початок координат з останньою крапкою діаграми роботи сил опору, одержимо похилу пряму, що представляє собою діаграму роботи рушійних сил.
, являє собою лінійну функцію кута повороту провідної ланки. З'єднавши початок координат з останньою крапкою діаграми роботи сил опору, одержимо похилу пряму, що представляє собою діаграму роботи рушійних сил.
Продиференцирував графічно отриману пряму, на діаграмі рушійних моментів сил одержимо горизонтальну пряму визначальну величину постійного наведеного моменту рушійних сил.
Тому що збільшення кінетичної енергії
![]()
те для побудови діаграми збільшення кінетичної енергії або надлишкової роботи необхідно з ординат діаграми роботи рушійних сил відняти ординати діаграми робіт сил опору.
Масштаби по координатних осях залишаються ті ж, що й для діаграми робіт.
Похожие работы
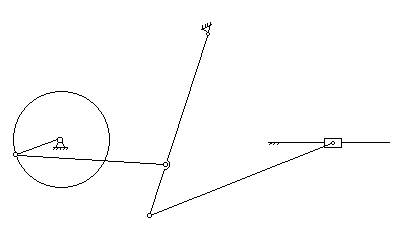
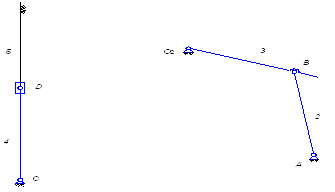
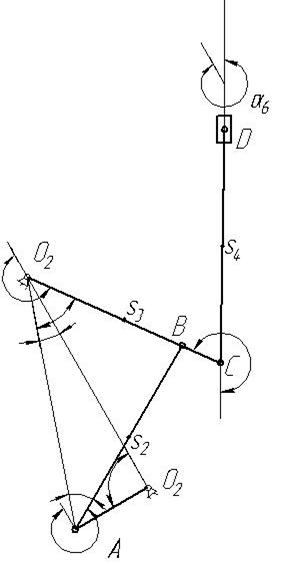
... додатку 1, рисунок 1[14], вариант 5. О2 3 1 О15 А 2 В Д 4 С Рис 1.1.Механізм важіля Механізм важіля складається з п’яти ланок, де ланка ...
0 комментариев