Навигация
Определение ускорений точек механизма
19781
знак
2
таблицы
1
изображение
1.4 Определение ускорений точек механизма
Ускорение точки А направлено по кривошипу к центру вращения О1.
aA=w12lO1A=15,712∙0.22=54,3м/с2
Выбираем масштабный коэффициент ускорений:
ka=![]() =54,3/108,6=0.25 м*с-2/мм
=54,3/108,6=0.25 м*с-2/мм
На плане ускорений изображаем ускорение точки А отрезком ![]() а=108 мм. Ускорение точки А’ определяем, решая совместно систему
а=108 мм. Ускорение точки А’ определяем, решая совместно систему
Для этого используем
aA’Ak=2∙w3 ∙VA’A=2∙VA’O2∙VA’A/A’O2=2∙Pva’∙aa’∙c/A’O2
c- коэффициент перечета определяется по формуле:
с=![]()
 =0.052/(0.5∙0.0025)=2
=0.052/(0.5∙0.0025)=2

Ускорение точки С’ определим из соотношения:

Ускорение точки С найдём, решая совместно систему
где
аCC’k=2·ω3·VCC’=2· РuA’·СС’·c/А’О2;
Ускорения всех точек механизма найдены. Ускорения для остальных положений механизма определяются аналогично. Значения ускорений сводим в таблицу 1.2.
Таблица 1.2- Значения ускорений.
| Ускорения, м/с2 | Положение механизма | ||||||
| 1 | 3 | 5 | 7 | 9 | 11 | 0 | |
| aA | 54,4 | 54,4 | 54,4 | 54,4 | 54,4 | 54,4 | 54,4 |
| aA’Ak | 14,37 | 7,74 | 12,02 | 7,55 | 24,7 | 23,56 | 0 |
| aA’O2n | 3,88 | 13,84 | 10,74 | 0,775 | 20,24 | 7,9 | 0 |
| ac’ | 15,3 | 5 | 7 | 24 | 40,6 | 48,1 | 32 |
| aCC’k | 0,75 | 0,5 | 1,25 | 0,00 | 3,45 | 1,9 | 0 |
| aC | 16,45 | 6,25 | 8,75 | 26,5 | 41,8 | 50,35 | 34 |
1.5 Диаграмма движения входного звена
Диаграмму перемещения S-t строим используя полученную из плана механизма траекторию движения точки С. Диаграммы скоростей V-t и ускорений а-t определяются из полученных 12-ти планов скоростей и планов ускорений.
Масштабные коэффициенты диаграмм
Кs=0.0025 (м/мм)
КV=0.05 (мс-1/мм)
Ка=0,5 (мс-2/мм)
1.6 Определение угловых скоростей и ускорений
ω1=![]() =3,14·150/30=15,71 (рад/с)
=3,14·150/30=15,71 (рад/с)
ω3=![]() =3,46/280·0,0025=4,94 (рад/с)
=3,46/280·0,0025=4,94 (рад/с)
ε1=0 (рад/с-2)
ε3= =14,88/280·0,0025=21,26 (рад/с-2)
=14,88/280·0,0025=21,26 (рад/с-2)
1.7 Определение ускорений центров масс звеньев механизма
Ускорения центров масс звеньев механизма определяем из планов ускорений.
aS'=Ka·РаS3=0.5*45=22,5 м/с2
Определяем относительные угловые скорости.
ω10= ω1=15,71 рад/с;
ω30= ω3=4,94 рад/с;
ω12= ω1- ω3=10,77 рад/с;
ω45= ω3=4,94 рад/с;
Похожие работы
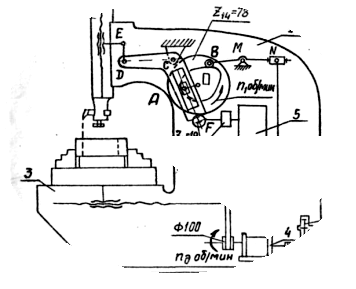
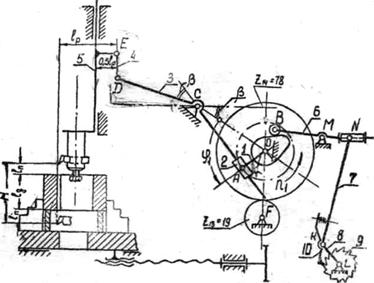
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
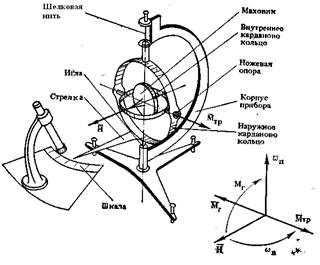
... выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в. 7.4. Авиационный гироскоп направления Несмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором ...


... через угловой рычаг передается движение ножу. У сенокосилки, кроме передачи к ножам, при помощи этих механизмов происходит подъем пальцевых брусьев. Цепная передача Рисунок 9 – Цепная передача Цепи в основном делятся на два вида — кольцевые и пластинчатые. Обыкновенные кольцевые цепи обычно применяются для поднятия грузов, а пластинчатые как для поднятия грузов, так и для передачи ...
... удобрений В комплексе мероприятий по внедрению интенсивных технологий большое значение имеет повышение плодородия почв за счёт внесения удобрений и химических мелиорантов. Из жидких минеральных удобрений в сельском хозяйстве используют аммиачную воду (водный аммиак), жидкий (безводный) аммиак, углеаммиакаты и жидкие комплексные удобрения. Жидкий аммиак вносят агрегатами АБА-0,5М и АША-2. ...
0 комментариев