Навигация
Определение кинетической энергии и приведенного момента инерции механизма
19781
знак
2
таблицы
1
изображение
2.7 Определение кинетической энергии и приведенного момента инерции механизма
Кинетическая энергия механизма равна сумме кинетической энергии звеньев:
Тмех=∑Тi
Для механизма насоса с заданными параметрами кинетическая энергия звена равна:
∑Тi=Т3+Т5=
Где
JO2’= =12·0,352/3=0,49 кг·м2
=12·0,352/3=0,49 кг·м2
JO2’’=![]() =30·0,1552/3=0,24 кг·м2
=30·0,1552/3=0,24 кг·м2
Т3=(0,49+0,24)·4,942/2=8,9 Дж
Т5=35·0,95/2=16,62 Дж
Тмех=8,9+16,62=25,52 Дж
За звено приведения обычно выбирают ведущее звено. Так как у исследуемого механизма ведущим звеном является кривошип, то кинетическая энергия определится по формуле:
Tпр=
Откуда находим приведенный момент инерции:
Jпр=
Jпр=2·25,52/15,712=0,2 кг·м2
3 Геометрический расчет зубчатой передачи. Проектирование планетарного механизма
3.1 Геометрический расчет зубчатой передачи
Исходные данные:
Число зубьев шестерни Z5=11;
Число зубьев колеса Z6=25;
Модуль m=6 мм;
Нарезание проводится методом обкатки инструментом реечного типа, который профилируется на основе исходного контура по ГОСТ 13755-81 и имеет следующие значения: угол профиля ![]() ; коэффициент высоты головки
; коэффициент высоты головки ![]() ; коэффициент радиального зазора
; коэффициент радиального зазора ![]() ;
;
Определяем геометрические параметры эвольвентной передаче.
Определяем минимальный коэффициент смещения:
Z5<17и Z5+Z6≥34, следовательно, передача равносмещенная,
x5=(17-Z5)/17=(17-11)/17=0,35 мм;
x6=-x5=-0,35 мм;
Определяем делительное межосевое расстояние:
а= 0,5·m·(Z5+Z6)= 0.5·6·(11+25)=108 мм;
Определяем высоту зуба:
h=m(2ha*+c*)=6(2·1+0,25)=13,5 мм;
4) Делительная высота головки зуба:
ha=m·(ha*+x);
ha5= m·(ha*+x5)= 6·(1+0,35)= 8,1 мм;
ha6=m·(ha*+x6)=6·(1-0,35)= 3,9 мм;
5) Делительная высота ножки зуба:
hf= m·(ha*+C-x);
hf5= m·(ha*+C-x5)= 6·(1+0,25-0,35)= 5,4 мм;
hf6= m·(ha*+C+x6)= 6·(1+0,25+0,35)= 9,6 мм;
Диаметр делительной окружности:
d5= m·Z5= 6·11= 66 мм;
d6= m·Z6= 6·25= 150 мм;
Диаметр основной окружности:
db5= m·Z5·cos(α)= 6·11· cos(20)= 62,05 мм;
db6= m·Z6·cos(α)= 6·25· cos(20)= 147 мм;
Диаметр окружности вершин зубьев:
da=m·Z+2m·(ha*+x);
da5=m·Z5+2m·(ha*+x5)=6∙11+2·6(1+0,35)= 82,2 мм;
da6=m·Z6+2m·(ha*+x6)=6∙25+2·6(1-0,35)= 157,8 мм;
Диаметр окружностей впадин зубьев:
df=mZ-2m(ha*+C*-x);
df5=mZ5-2m(ha*+C*-x5)=11·5-2·6(1+0,25-0,35)=55,2 мм;
df6=mZ6-2m(ha*+C*-x6)=25·5-2·6(1+0,25+0,35)=130,8 мм;
10) Делительная окружная толщина зуба:
S=0,5·π·m+2m·x·tg(α);
S5=0,5·3,14·6+2·6·0,35·tg(20)= 10,9 мм;
S6=0,5·3,14·6-2·6·0,35·tg(20)= 7,9 мм;
Делительный шаг:
P= π·m = 3,14·6=18,84 мм;
12) Основной шаг:
Pb= π·m cos(α)= 3,14·6·0,94=17,7 мм;
13) Радиус кривизны галтели
ρ=0,38m=2.28 мм;
14) Строим зубчатую передачу с масштабным коэффициентом Kl=0,00025 м/мм;
15) Проверяем коэффициент торцевого перекрытия
а) аналитический метод:


 1,57
1,57
б) графический метод:

где ![]() – длина активной линии зацепления.
– длина активной линии зацепления.
3.2 Определение передаточного отношения планетарной ступени и подбор числа зубьев колес
Исходные данные:
nкр=150 мин-1;
nдв=1500 мин-1;
Z5=11;
Z6=25;
знак передаточного отношения привода (-)
Составляем общее передаточное отношение механизма:
Рассчитаем передаточное отношение ![]() и
и ![]() через исходные данные:
через исходные данные:
![]()
Из исходного уравнения определяем передаточное отношение планетарной ступени:
![]()
![]() ;
;
Составляем формулу Виллиса для планетарной передачи:
 ;
;
![]()
![]() ;
;
Запишем через числа зубьев передаточное отношение обращенного механизма:
 ;
;
Подбираем числа зубьев:
 ;
;  ;
;
Z1+Z2=Z4-Z3;
Z1+Z2=30+30=60
Z3+Z4=85-25=60
Z1=30, Z2=30, Z3=25, Z4=85
По выбранным числам зубьев определяем размеры колес:
d=m·Z;
d1=6·40=240 мм;
d2=6·40=240 мм;
d3=6·25=150 мм;
d4=6·85=510 мм;
d5=6·11=66 мм;
d6=6·25=150 мм
Масштабный коэффициент построения Кl=0,001 м/мм;
Для построения плана скоростей редуктора определяем скорость точки А:
![]() м/с;
м/с;
Строим план скоростей. Масштабный коэффициент плана скоростей
![]() мс-1/мм;
мс-1/мм;
Похожие работы
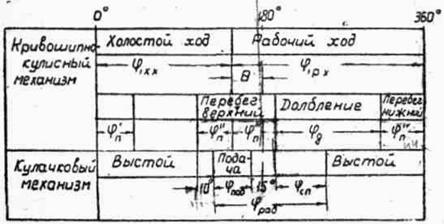
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
... выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в. 7.4. Авиационный гироскоп направления Несмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором ...


... через угловой рычаг передается движение ножу. У сенокосилки, кроме передачи к ножам, при помощи этих механизмов происходит подъем пальцевых брусьев. Цепная передача Рисунок 9 – Цепная передача Цепи в основном делятся на два вида — кольцевые и пластинчатые. Обыкновенные кольцевые цепи обычно применяются для поднятия грузов, а пластинчатые как для поднятия грузов, так и для передачи ...
... удобрений В комплексе мероприятий по внедрению интенсивных технологий большое значение имеет повышение плодородия почв за счёт внесения удобрений и химических мелиорантов. Из жидких минеральных удобрений в сельском хозяйстве используют аммиачную воду (водный аммиак), жидкий (безводный) аммиак, углеаммиакаты и жидкие комплексные удобрения. Жидкий аммиак вносят агрегатами АБА-0,5М и АША-2. ...
0 комментариев