Навигация
2.3 Расчёт диады II (2,3)
Выделим диаду 2-3 и нагрузим её силами. Действие отброшенных звеньев 1,0 на третье заменяем действием реакций связей R21 и R30, которые требуется определить. Реакцию R21 направляем перпендикулярно линии движения ползуна, модуль неизвестен. Реакция R30 в шарнире О2 неизвестна ни по модулю ни по направлению; на схеме направляем её произвольно. Действие отброшенного звена 4 на третье известно: Реакция R34 равна по величине и противоположно направлена реакции R43, которая уже определена из плана сил диады II (4,5). Силы тяжести G3’ и G3’’ наносим на диаду в центрах масс стержней S3’ и S3’’. Силы инерции U3’ и U3’’ прикладываем в точках К’ и К’’, расположенных на расстоянии 2/3 длин стержней. Силы инерции направляем противоположно ускорениям центров масс согласно плана ускорений.
Составляем условия равновесия диады II(2,3):
∑Р(2,3)=0, R21+G3’+U3’+G3’’+U3’’+R34+R30=0 (2)
Данное уравнение содержит три неизвестных: модуль реакции R21, модуль и направление реакции R30. Значит уравнение (2) графически не решается. Реакция R21 может быть определена аналитически из уравнения моментов сил относительно точки О2.
∑М О2 (зв.2,3)=0, R21·AO2-U3’·hu3’+G3’·hg3’-U3’’·hu3’’-G3''·hg3’’-R34·O2C=0;
Откуда
R21= (U3’·hu3’- G3’·hg3’+ U3’’·hu3’’+ G3''·hg3’’+ R34·O2C)/ AO2
R21=(270·233-117,72·53+255·102-294,3·74+4500·132)/280=2539 Н
Теперь уравнение (2) содержит два неизвестных, а следовательно решается графически.
Строим план сил диады II(2,3) по уравнению (2). Считаем отрезки плана сил:
![]() = U3’/Кр=270/20=13,5 мм.
= U3’/Кр=270/20=13,5 мм.
![]() = U3’’/ Кр=255/20=12,75 мм.
= U3’’/ Кр=255/20=12,75 мм.
![]() = R21/ Кр=2539/20=126,95 мм.
= R21/ Кр=2539/20=126,95 мм.
![]() = G3’/ Кр=117,72/20=5,8 мм.
= G3’/ Кр=117,72/20=5,8 мм.
![]() = G3''/ Кр=294,3/20=14,7 мм.
= G3''/ Кр=294,3/20=14,7 мм.
Согласно уравнению (2) строим сумму векторов сил, откуда находим:
R30= ![]() ·Кр=274·20=5480 Н.
·Кр=274·20=5480 Н.
2.4 Расчёт кривошипа
Силовой расчёт кривошипа состоит в определении реакции стойки на кривошип R10 и уравновешивающей силы Ру, имитирующей действие силы со стороны двигателя.
Реакция R21 известна, так как R12= R21. Величина Рур определиться из уравнения моментов сил относительно точки О1 кривошипа.
∑М О1 (зв.1)=0, Рур·АО1-R12·hR12=0
Рур’= R12·hR12/ АО1=2539 40/88=1154 Н
Реакция стойки на кривошип R10 определиться из условия равновесия кривошипа:
![]() P(кр)=R21+Py+R10=0 (3)
P(кр)=R21+Py+R10=0 (3)
По уравнению (3) строим план сил кривошипа, откуда определяем искомую реакцию R10
R10= R10·Кр=110·20=2200 Н.
2.5 Определение уравновешивающей силы методом Жуковского
Уравновешивающую силу можно определить с помощью план скоростей по методу рычага Жуковского.
Строим повёрнутый на 90˚план скоростей и приложим к нему все внешние силы, действующие на механизм. План скоростей рассматриваем как жёсткий рычаг с опорой в полюсе. Рычаг находится в равновесии под действием приложенных сил.
Составляем уравнение равновесия рычага в форме суммы моментов сил в форме суммы моментов сил относительно полюса плана скоростей.
∑МPv1=0
Pyp’·Pva-(Q+U5+G5)·PvC-U3’’·hU3’’-G3’’·hG3’’-U3’·hU3’+G3’·hG3’=0
Pyp’=((Q+U5+G5)·PvC+ U3’’·hU3’’+ G3’’·hG3’’+ U3’·hU3’- G3’·hG3’)/ Pva
Pyp’=((3450+535,5+343,35)·47+255·33+294,3·24+270·69-117,72·13)/179
Pyp’=1173 Н
Сравниваем значения Pyp и Pyp’, найденные двумя способами
δ=( Pyp’- Pyp)/ Pyp’
δ=(1173-1154)·100%/1173=1,62%
2.6 Определение мощности
Мгновенная потребная мощность привода насоса без учёта потерь мощности на трение определяется соотношением:
Npy=Pyp·VA=1173·3,46=4058,58 Вт
Мощность привода, затраченная на преодоления только полезной нагрузки:
NQ=Q·Vc=3450·0,95=3277,5 Вт
Потери мощности во вращательных кинематических парах:
N10=R10·f’·(ω1-ω0)·rц=2200·0,132·15,71·0,025=114,5 Вт
N12=R12·f’·(ω1-ω3)·rц=2539·0,132·10,77·0,025=90,2 Вт
N30=R30·f’·(ω3-ω0)·rц=5480·0,132·4,94·0,025=89,3 Вт
N45=R45·f’·(ω3-ω5)·rц=4420·0,132·4,94·0,025=72,05 Вт
Где rц-радиус цапфы вала, rц=0,025 м,
f’- приведенный коэффициент трения, f’=(1,2…1,5)f=0,132
Потери мощности в поступательных кинематических парах:
N23=R23·f’·VA’A=2539·0,132·1,65=553 Вт
N34=R34·f’·VC’C=4420·0,132·0,85=495 Вт
N50=R50·f’·VC=1320·0,132·0,95=165,5 Вт
Суммарная мощность трения:
Nтр=∑Ni=N10+N12+N30+N45+N23+N34+N50
Nтр=114,5+90,2+89,3+72,05+553+495+165,5=1579,2 Вт
Мгновенная потребляемая мощность двигателя:
N=NРу+Nтр
N=4058,58+1579,2=5637,78 Вт
Похожие работы
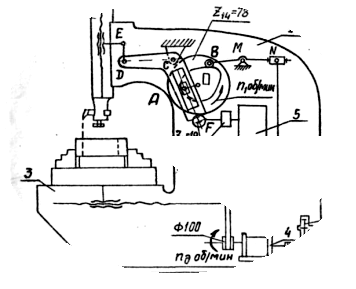
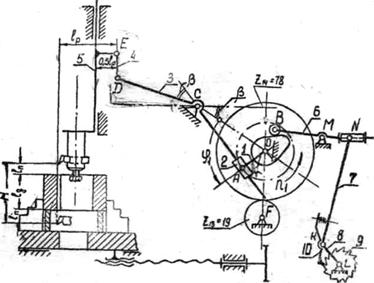
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
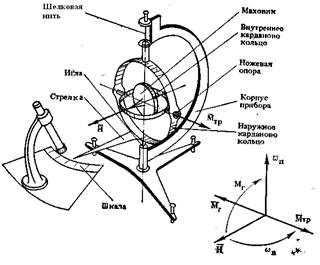
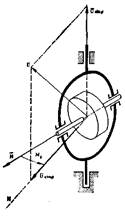
... выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в. 7.4. Авиационный гироскоп направления Несмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором ...


... через угловой рычаг передается движение ножу. У сенокосилки, кроме передачи к ножам, при помощи этих механизмов происходит подъем пальцевых брусьев. Цепная передача Рисунок 9 – Цепная передача Цепи в основном делятся на два вида — кольцевые и пластинчатые. Обыкновенные кольцевые цепи обычно применяются для поднятия грузов, а пластинчатые как для поднятия грузов, так и для передачи ...
... удобрений В комплексе мероприятий по внедрению интенсивных технологий большое значение имеет повышение плодородия почв за счёт внесения удобрений и химических мелиорантов. Из жидких минеральных удобрений в сельском хозяйстве используют аммиачную воду (водный аммиак), жидкий (безводный) аммиак, углеаммиакаты и жидкие комплексные удобрения. Жидкий аммиак вносят агрегатами АБА-0,5М и АША-2. ...
0 комментариев