Навигация
Определение частот вращения зубчатых колес аналитическим методом
19781
знак
2
таблицы
1
изображение
3.3 Определение частот вращения зубчатых колес аналитическим методом
n1= nдв=1500 мин-1;
n6= nкр=150 мин-1;
 ;
;
![]() мин-1;
мин-1;
![]() ;
;
![]() мин-1;
мин-1;
![]() мин-1;
мин-1;
Значения частот вращения получим графическим методом:
![]() мин-1;
мин-1;
![]() мин-1;
мин-1;
![]() мин-1;
мин-1;
![]() мин-1;
мин-1;
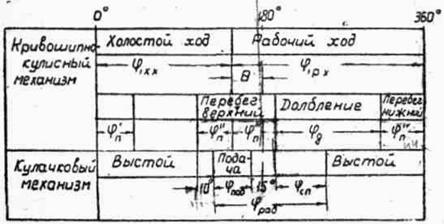
4 Синтез и анализ кулачкового механизма
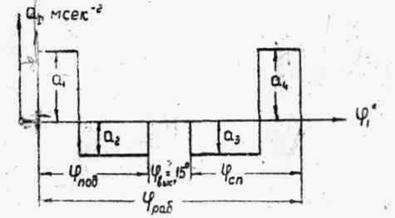
4.1 Диаграммы движения толкателя
Исходные данные:
Максимальный подъём толкателя h=29 мм;
Фазовый рабочий угол φ=290;
Дезаксиал е=0 мм;
nкр=150 об/мин;
Z5=11;
Z6=25
Угол давления α=25;
По заданному графику V-t графическим диференцированием получим график а-t, графическим интегрированием - S-t. Базы Н1=20 мм, Н2=25 мм. Методом исключения общего параметра t получим график V-S, a-S, a-V. Масштабные коэффициенты графиков:
Ks=![]() м/мм;
м/мм;
Kv=![]() мс-1/мм
мс-1/мм
Kt=![]() c/мм;
c/мм;
Ka=![]() мс-2/мм
мс-2/мм
4.2 Определение минимального радиуса кулачка
Минимальный радиус кулачка выбирается из условия выполнения угла давления. Для этого строим совмещённый график S’-V, где S’- текущее перемещение в стандартном масштабе КS’=0,0005 м/мм, V- аналог скорости.
На совмещённом графике на горизонтальных линиях откладываем аналоги скорости в масштабе КS’
x1=![]() мм
мм
x2=![]()
К совмещённому графику проводим две касательные под углом давления α. Ниже точки пересечения касательных выбирается центр вращения кулачка и соединяется с началом совмещённого графика. Это и будет минимальный радиус кулачка.
R0’=R0’·KS’=40·0,0005=0,02 м;
4.3 Построение профиля кулачка
Профилирование кулачка выполняется методом обращённого движения. Для этого строим кулачок в масштабе Кl=0,00025 м/мм. Проводим окружность радиусом R0’ и окружность радиуса е. Откладываем угол φр=290. Делим его на 12 частей и через точки деления проводим оси толкателя в обращённом движении. Вдоль осей толкателя откладываем текущее перемещение толкателя от окружности R0’. Соединяя полученные точки получим центровой профиль кулачка. Радиус ролика выбираем из условия:
rp=(0,2…0,4)R0’=0,25∙40=10 мм
Минимальный радиус действительного профиля:
R0=R0’-rp=40-10=30 мм
Обкатывая ролик по центровому профилю получаем действительный профиль.
Public Sub kul()
Dim I As Integer
Dim dis1, dis2, R, a1, a2, arksin1, arksin2, BETTA, BET As Single
Dim R0, FIR, FI0, FII, SHAG, E As Single
Dim S(1 To 10) As Single
R0 = InputBox("ВВЕДИТЕ МИНИМАЛЬНЫЙ РАДИУС КУЛАЧКА RO")
FIR = InputBox("ВВЕДИТЕ РАБОЧИЙ УГОЛ КУЛАЧКА FIR")
FI0 = InputBox("ВВЕДИТЕ НАЧАЛЬНОЕ ЗНАЧЕНИЕ УГЛА ПОВОРОТА КУЛАЧКА FI0")
E = InputBox("ВВЕДИТЕ ДЕЗАКСИАЛ E")
For I = 1 To 10
S(I) = InputBox("ВВЕДИТЕ СТРОКУ ПЕРЕМЕЩЕНИЙ S(" & I & ")")
Next I
FIR = FIR * 0.0174532
SHAG = FIR / 10
FI0 = FI0 * 0.0174532
FII = FI0
For I = 1 To 10
dis1 = (R0 ^ 2 - E ^ 2) ^ (1 / 2)
dis2 = S(I) ^ 2 + R0 ^ 2 + 2 * S(I) * dis1
R = dis2 ^ (1 / 2)
a1 = E / R
a2 = E / R0
arksin1 = Atn(a1 / (1 - a1 ^ 2) ^ (1 / 2))
arksin2 = Atn(a1 / (1 - a2 ^ 2) ^ (1 / 2))
BETTA = FII + arksin1 - arksin2
BETTA = BETTA * 180 / 3.1415
Worksheets(1).Cells(I, 1) = R
Worksheets(1).Cells(I, 2) = BETTA
FII = FII + SHAG
Next I
End Sub
Список использованных источников
1. Машков А.А. Теория механизмов и машин. Мн., 1971.
2. Артоболевский И.И. Теория механизмов и машин. М., 1975.
3. Фролов К.В., Попов С.А., Мусатов А.К. и др. Теория механизмов и машин под ред. К.В. Фролова М., 1986.
4. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин. М., 1998.
Похожие работы
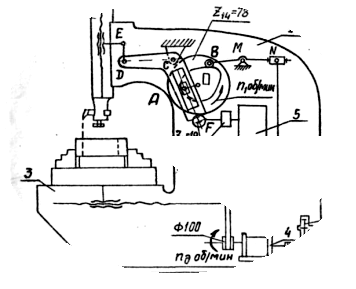
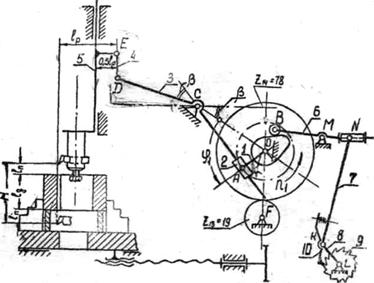
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
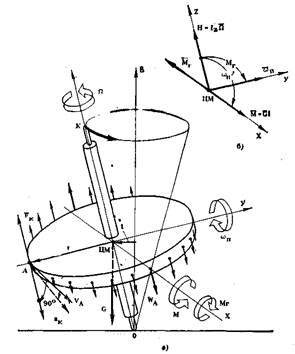
... выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в. 7.4. Авиационный гироскоп направления Несмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором ...


... через угловой рычаг передается движение ножу. У сенокосилки, кроме передачи к ножам, при помощи этих механизмов происходит подъем пальцевых брусьев. Цепная передача Рисунок 9 – Цепная передача Цепи в основном делятся на два вида — кольцевые и пластинчатые. Обыкновенные кольцевые цепи обычно применяются для поднятия грузов, а пластинчатые как для поднятия грузов, так и для передачи ...
... удобрений В комплексе мероприятий по внедрению интенсивных технологий большое значение имеет повышение плодородия почв за счёт внесения удобрений и химических мелиорантов. Из жидких минеральных удобрений в сельском хозяйстве используют аммиачную воду (водный аммиак), жидкий (безводный) аммиак, углеаммиакаты и жидкие комплексные удобрения. Жидкий аммиак вносят агрегатами АБА-0,5М и АША-2. ...
0 комментариев