Навигация
Введение
Конвейер типа ПК-19 предназначен для перемещения сыпучих материалов в горизонтальном направлении.
Строгание осуществляется резцом, закреплённым в резцовой головке, которая возвратно–поступательно движется совместно с ползуном.
В поперечно–строгальный станок входят рычажный, зубчатый и кулачковый механизмы. Целью данного курсового проекта является синтез каждого из узлов по заданным параметрам.
Для перемещения ползуна используется кулисный механизм с качающейся кулисой, состоящий из кривошипа, камня, шатуна и ползуна. Кулисный механизм предназначен для преобразования вращательного движения в поступательное движение.
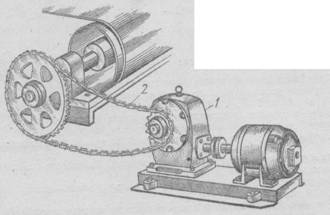
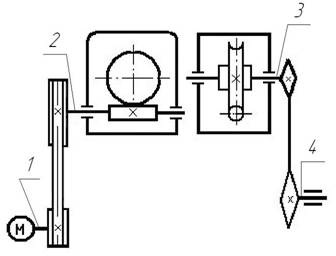
Электродвигатель через планетарный механизм и одноступенчатую рядовую зубчатую передачу приводит в движение кривошип кулисного механизма. Зубчатый механизм предназначен для понижения оборотов двигателя до оборотов кривошипа.
На одном валу с кривошипом насажен кулачковый механизм, который приводит в движение толкатель, связанный с механизмом смазки станка и регулирует подачу смазочного материала в зону смазки.
1. Синтез и анализ рычажного механизма
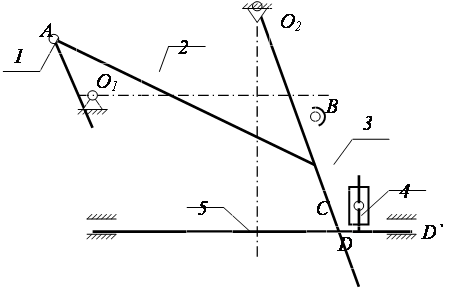
Рисунок 1 - Схема механизма:
Исходные данные :
1. Координаты центра вращения кривошипа
![]()
2.Длина звена О2С
![]()
3.Расстояние между точками О2 и В
![]()
4.Угол отклонения звена О2С от оси симметрии
![]()
5.Частота вращения кривошипа
![]()
6.![]() ;
; ![]()
1.1 Структурный анализ механизма
Механизм состоит из пяти подвижных звеньев: кривошипа 1, шатуна 2, коромысла 3, камня 4, ползуна 5. Все звенья, соединяясь между собой, образуют 7 кинематических пар: вращательных в точках О1, А, В, О2, С и поступательных в точках D и D`.
Определим степень подвижности механизма по формуле Чебышева:
![]()
где р1 – количество одноподвижных кинематических пар, р2 – количество двуподвижных кинематических пар. Поскольку в данном механизме имеется только 7 шарнирных соединений, то р1=7, р2=0. Откуда
![]()
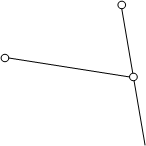
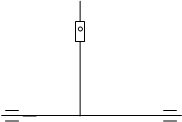
К начальному звену 1 присоединены последовательно группы Ассура: (2,3) – второго класса, второго порядка, и (4,5) – второго класса, второго порядка. Ниже показано разложение механизма на структурные группы Ассура:
 О2
О2
О1 A C
B
D D`
Рисунок 2 - Разложение механизма на структурные группы Ассура:
Формула механизма:
![]() .
.
По классификации Артоболевского – механизм второго класса, второго порядка.
1.2 Определение недостающих размеров
Недостающие размеры определим графическим способом – построением планов механизма. Выбираем масштабный коэффициент построения планов механизма:

В масштабе КL по заданным значениям координат X и Y на чертеже наносят точки О1 и О2, и строят крайние положения О2В0 и О2В0` коромысла О2В. Соединив точку О1 (центр вращения кривошипа) с точками В0 и В0` получим два крайних положения механизма – ближнее О1В0О2 и дальнее О1В0`О2.

АВ + О1А = О1В0`
АВ - О1А = О1В0
В полученной системе двух линейных уравнений с двумя неизвестными правые части известны, так как О1В0` и О1В0 можно измерить на чертеже, в мм. Решая полученную систему уравнений совместно, определяют длину шатуна и кривошипа
 ,
,
 .
.
где О1В0 и О1В0` - отрезки, измеренные на чертеже, мм,
КL – масштабный коэффициент длин, м/мм.
Похожие работы
... *0,72*0,992=3,764 кВт; Р4=Р3 η3=5,124*0,95=3,576 кВт, что близко к заданному. Определяем вращающие моменты на каждом валу привода по формуле (Нм) (2.5) ; ; ; . Все рассчитанные параметры сводим в табл.1. Таблица 1 Параметры кинематического расчета № вала n, об/мин ω, рад/с Р, кВт Т, Нм U Дв. (1) 1444,5 151,27 5,5 36,35 2 ...
... = 60 ґ n ґ Lh / 106 L = 60 ґ 1435 ґ 100000 / 106 = 861 7.1.9. Определяю расчетную динамику подшипника c = PIIпр3.3 z c = 1222.16 3.3 861 = 9473.77 Основные характеристики принятого подшипника: Подшипник № 36205 d = 25мм D = 52мм C = 16700H = 15мм r = 1.5мм C0 = 9100H n = 13000 об/мин 7.2. Проектный расчет второго вала редуктора и подбор подшипников d2 = c 3 ...
... ; ´Рэ Рэ = 2.2 кВт Т.к. частота вращения nс = 1500 об/мин; число полюсов 4 и S% = 5,1, то По табл. П2 с.65 [1] выбираем условное обозначение электродвигателя 4А132S5 1.2 Кинематический расчет привода Определяем асинхронную частоту вращения. nq = nc (1 – (S% / 100)) nq = 1500(1-(5.1 / 100)) = 1423 Определяем общее передаточное число привода. U = nq /nб U = 1423/160 = 8.9 ...
... выбранного двигателя необходимо проверить по следующим условиям: · Условия неперегревания · Условие перегрузка Так условию перегрузки удовлетворяет лишь двигатель 4А160М2У3, то принимаем его в качестве привода редуктора. 1.2 Определение исходных данных Определение длительности действия max нагрузок Так как N1>5*104 => первая передача рассчитывается на усталость с 1 – го ...
0 комментариев