Навигация
Построение планов скоростей
19526
знаков
3
таблицы
8
изображений
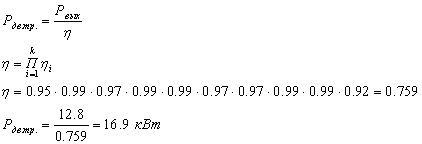
1.3 Построение планов скоростей
Определяем скорость конца кривошипа (А), допуская, что ω1=const, то скорость точки А для всех положений постоянна.

n=65 - число оборотов кривошипа.
![]()
Скорость точки А кривошипа изображаем на плане в виде отрезка РVа=44мм. В таком случае, масштабный коэффициент плана скоростей
![]()
Вектор РVа направляем перпендикулярно текущему положению кривошипа и по направлению вращения. Для определения скорости точки В составим систему векторных уравнений, решая которую, получим отрезок PVb – изображение скорости точки В:
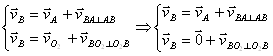
Откуда
![]() ,
, ![]() .
.
Для первого положения механизма имеем
![]() ,
, ![]() .
.
Скорость точки С (отрезок PVc) определим из свойства подобия плана скоростей:
![]()
![]()
Для первого положения механизма получаем
![]()
![]() .
.
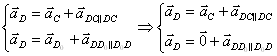
Для определения скорости точки D составим систему уравнений:

Решая графически эту систему уравнений, получим отрезок PVd на плане скоростей, изображающий скорость точки D. Для первого положения механизма имеем PVd=40,91 мм,
![]() .
.
После построения планов скоростей имеем:
Таблица 1.1. Значения скоростей.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| VA, м/с | 0,44 | |||||||||||
| VВ, м/с | 0,29 | 0,42 | 0,44 | 0,36 | 0,22 | 0,05 | 0,13 | 0,31 | 0,47 | 0,53 | 0,34 | 0 |
| VC, м/с | 0,43 | 0,63 | 0,66 | 0,54 | 0,33 | 0,08 | 0,19 | 0,46 | 0,70 | 0,79 | 0,52 | 0 |
| VD, м/с | 0,41 | 0,62 | 0,66 | 0,53 | 0,32 | 0,07 | 0,18 | 0,45 | 0,70 | 0,79 | 0,50 | 0 |
| VВА, м/с | 0,24 | 0,06 | 0,10 | 0,24 | 0,38 | 0,44 | 0,40 | 0,23 | 0,07 | 0,41 | 0,56 | 0 |
| VDC, м/с | 0,12 | 0,09 | 0,01 | 0,10 | 0,08 | 0,03 | 0,06 | 0,11 | 0,07 | 0,08 | 0,14 | 0 |
1.4 Построение планов ускорений
Планы ускорений строим, начиная с кривошипа. Кривошип совершает равномерное вращательное движение, поэтому
![]() ;
; ![]() .
.
На плане ускорений изображаем его отрезком ![]() . Отсюда масштабный коэффициент плана ускорений:
. Отсюда масштабный коэффициент плана ускорений:
![]() .
.
Ускорение точки А кривошипа направляем от точки А к полюсу вращения – точке О1.
Для определения полного ускорения точки В шатуна составим систему:

Нормальные ускорения найдём по формуле:
![]() ;
;
Соответственно определяем
![]()
Решая вышеприведенную систему векторных уравнений с учётом найденных ускорений, получим полные ускорения точки В.
Полное ускорение точки С найдём по свойству подобия:
![]() .
.
Для первого положения механизма имеем
![]()
Для определения ускорения точки D составим систему векторных уравнений
и решим её графически. Решая эту систему для первого положения механизма, получаем
![]() и
и ![]() .
.
Таблица 1.2. Значения ускорений.
| 1 | 3 | 5 | 7 | 9 | 11 | 12 | |
| аА, м/с2 | 3,02 | ||||||
| аВ, м/с2 | 2,78 | 1,06 | 2,11 | 2,35 | 2,06 | 3,99 | 3,74 |
| аC, м/с2 | 4,17 | 1,59 | 3,17 | 3,53 | 3,09 | 5,99 | 5,61 |
| аD, м/с2 | 4,13 | 0,69 | 3,14 | 3,37 | 2,76 | 5,94 | 5,27 |
| аВАn, м/с2 | 0,2 | 0,03 | 0,51 | 0,58 | 0,02 | 1,10 | 0 |
| aBO2n, м/с2 | 0,4 | 0,96 | 0,24 | 0,08 | 1,10 | 0,59 | 0 |
| aBA, м/с2 | 2,56 | 1,51 | 1,38 | 1,40 | 4,64 | 1,10 | 2,08 |
| аDC, м/с2 | 0,61 | 1,43 | 0,42 | 1,03 | 1,40 | 0,79 | 1,92 |
Похожие работы
... *0,72*0,992=3,764 кВт; Р4=Р3 η3=5,124*0,95=3,576 кВт, что близко к заданному. Определяем вращающие моменты на каждом валу привода по формуле (Нм) (2.5) ; ; ; . Все рассчитанные параметры сводим в табл.1. Таблица 1 Параметры кинематического расчета № вала n, об/мин ω, рад/с Р, кВт Т, Нм U Дв. (1) 1444,5 151,27 5,5 36,35 2 ...
... = 60 ґ n ґ Lh / 106 L = 60 ґ 1435 ґ 100000 / 106 = 861 7.1.9. Определяю расчетную динамику подшипника c = PIIпр3.3 z c = 1222.16 3.3 861 = 9473.77 Основные характеристики принятого подшипника: Подшипник № 36205 d = 25мм D = 52мм C = 16700H = 15мм r = 1.5мм C0 = 9100H n = 13000 об/мин 7.2. Проектный расчет второго вала редуктора и подбор подшипников d2 = c 3 ...
... ; ´Рэ Рэ = 2.2 кВт Т.к. частота вращения nс = 1500 об/мин; число полюсов 4 и S% = 5,1, то По табл. П2 с.65 [1] выбираем условное обозначение электродвигателя 4А132S5 1.2 Кинематический расчет привода Определяем асинхронную частоту вращения. nq = nc (1 – (S% / 100)) nq = 1500(1-(5.1 / 100)) = 1423 Определяем общее передаточное число привода. U = nq /nб U = 1423/160 = 8.9 ...
... выбранного двигателя необходимо проверить по следующим условиям: · Условия неперегревания · Условие перегрузка Так условию перегрузки удовлетворяет лишь двигатель 4А160М2У3, то принимаем его в качестве привода редуктора. 1.2 Определение исходных данных Определение длительности действия max нагрузок Так как N1>5*104 => первая передача рассчитывается на усталость с 1 – го ...
0 комментариев