Навигация
2.4 Расчёт кривошипа
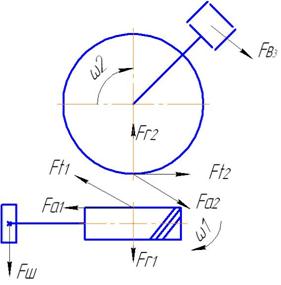
Изобразим кривошип с приложенными к нему силами и уравновешивающей силой Ру, эквивалентной силе действия на кривошип со стороны двигателя. Действие отброшенных связей учитываем, вводя реакции ![]() и
и ![]() . Определяем уравновешивающую силу, считая, что она приложена в точке А кривошипа, перпендикулярно ему. Уравнение равновесия кривошипа в этом случае принимает вид:
. Определяем уравновешивающую силу, считая, что она приложена в точке А кривошипа, перпендикулярно ему. Уравнение равновесия кривошипа в этом случае принимает вид:
![]()
откуда находим
![]()
![]()
2.5 Определение уравновешивающей силы методом Жуковского
Строим повёрнутый на 90° план скоростей и в соответствующих точках прикладываем все внешние силы, включая Ру и силы инерции. Составим уравнение моментов относительно точки РV, считая силу Ру неизвестной:
![]()
![]()
![]()
Погрешность графического метода
![]()
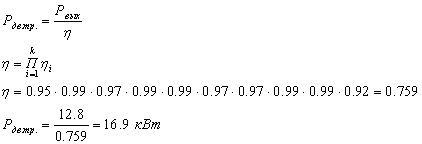
2.6 Определение мощностей
Мгновенная потребляемая мощность без учета потерь на трение:
![]()
Мощность привода на трение на преодоление силы полезного сопротивления:
![]() ,
,
где f- коэффициент трения, R-реакция во вращательной паре, rц – радиус цапф.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Суммарная мощность трения
![]()
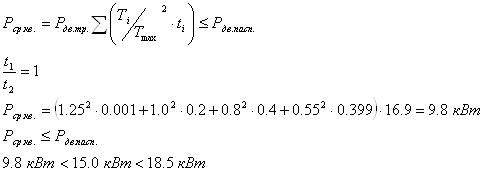
Мгновенная потребляемая мощность
![]()
2.7 Определение кинематической энергии механизма
Кинематическая энергия механизма равна суммарной кинематической энергии входящих в него массивных звеньев.

За звено приведения выбираем кривошип. Кинетическая энергия кривошипа равна:
![]()
![]()
![]()
3. Геометрический расчет зубчатой передачи. Проектирование
планетарного редуктора
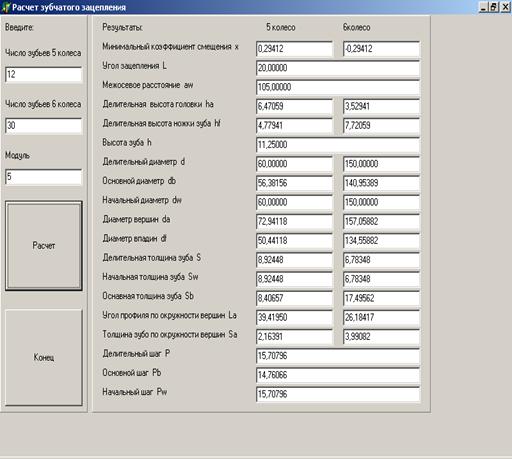
3.1 Геометрический расчёт зубчатой передачи
Исходные данные:
- число зубьев шестерни Z512
- число зубьев колеса Z630
- модуль зубчатых колёс m, мм5
Нарезание зубчатых колёс производится методом обкатки инструментом реечного типа, имеющего следующие параметры:
- коэффициент высоты головки зуба ![]()
![]() 1
1
- коэффициент радиального зазора ![]() 0,25
0,25
- угол профиля α, град20
Суммарное число зубьев колёс
![]()
Поскольку ![]() , то проектируем равносмещённое зубчатое зацепление.
, то проектируем равносмещённое зубчатое зацепление.
Минимальный коэффициент смещения шестерни и колеса
![]()
![]()
Делительное межосевое расстояние
![]()
Делительная высота головки зуба
![]()
![]()
Делительная высота ножки зуба
![]()
![]()
Высота зуба
![]()
Делительный диаметр
![]()
![]()
Основной диаметр
![]()
![]()
Диаметр вершин зубьев
![]()
![]()
Диаметр впадин зубьев
![]()
![]()
Делительная толщина зуба
![]()
![]()
Основная толщина зуба


Угол профиля по окружности вершин
![]()
![]()
Толщина зуба по окружности вершин


Делительный шаг
![]()
Основной шаг
![]()
Строим картину эвольвентного зацепления по результатам расчетов. Масштабный коэффициент построения ![]() .
.
Определение коэффициента торцового перекрытия аналитически
![]()
Текст расчетной программы
unit Unit1;
interface
uses
Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms,
Dialogs, StdCtrls, Buttons;
type
TForm1 = class(TForm)
GroupBox1: TGroupBox;
Edit1: TEdit; Edit2: TEdit; Edit3: TEdit; Edit4: TEdit; Edit5: TEdit;
Edit6: TEdit; Label1: TLabel; Label2: TLabel; Label3: TLabel;
Label4: TLabel; Label5: TLabel; Label6: TLabel; GroupBox2: TGroupBox;
Edit7: TEdit; Edit8: TEdit; Edit9: TEdit; Edit10: TEdit; Edit11: TEdit;
Edit12: TEdit; Edit13: TEdit; Edit14: TEdit; Edit15: TEdit; Edit16: TEdit;
Edit17: TEdit; Edit18: TEdit; Edit19: TEdit; Edit20: TEdit; Edit21: TEdit;
Edit22: TEdit; Edit23: TEdit; Edit24: TEdit; Edit25: TEdit; Edit26: TEdit;
Edit27: TEdit; Label7: TLabel; Label8: TLabel; Label9: TLabel;
Label10: TLabel; Label11: TLabel; Label12: TLabel; Label13: TLabel;
Label14: TLabel; Label15: TLabel; Label16: TLabel; Label17: TLabel;
Label18: TLabel; Label19: TLabel; Label20: TLabel; Label21: TLabel;
Label22: TLabel; Label23: TLabel; Label24: TLabel; Label25: TLabel;
Label26: TLabel; Label27: TLabel; BitBtn1: TBitBtn; BitBtn2: TBitBtn;
procedure BitBtn1Click(Sender: TObject);
private
{ Private declarations }
public
{ Public declarations }
end;
var
Form1: TForm1;
Z1,Z2,X1,X2,Aw,A,q,h,ha,ha1,c,ha2,m,hf1,hf2,d1,d2,dw1,dw2,db1,db2,da1,da2,
df1,df2,S1,S2,P,Pb,r:real;
implementation
{$R *.dfm}
procedure TForm1.BitBtn1Click(Sender: TObject);
begin
Z1:=strtoFloat(Edit1.Text);
Z2:=strtoFloat(Edit2.Text);
m:=strtoFloat(Edit3.Text);
ha:=strtoFloat(Edit4.Text);
c:=strtoFloat(Edit5.Text);
q:=strtoFloat(Edit6.Text);
q:=q*pi/180;
X1:=( 17-Z1)/17;
X2:=-X1;
A:=0.5*m*(Z1+Z2);
Aw:=A;
h:=2.25*m;
ha1:=m*(ha+X1);
ha2:=m*(ha+X2);
hf1:=m*(ha+c-X1);
hf2:=m*(ha+c-X2);
d1:=m*Z1;
d2:=m*Z2;
dw1:=d1;
dw2:=d2;
db1:=d1*cos(q);
db2:=d2*cos(q);
da1:=d1+2*ha1;
da2:=d2+2*ha2;
df1:=d1-2*hf1;
df2:= d2-2*hf2;
S1:=0.5*Pi*m+2*m*X1*sin(q)/cos(q);
S2:=0.5*Pi*m+2*m*X2*sin(q)/cos(q);
P:=Pi*m;
Pb:=P*cos(q);
r:=0.38*m;
Edit7.Text:=FloatToStr(X1);
Edit8.Text:=FloatToStr(X2);
Edit9.Text:=FloatToStr(a);
Edit10.Text:=FloatToStr(h);
Edit11.Text:=FloatToStr(ha1);
Edit12.Text:=FloatToStr(ha2);
Edit13.Text:=FloatToStr(d1);
Edit14.Text:=FloatToStr(d2);
Edit15.Text:=FloatToStr(dw1);
Edit16.Text:=FloatToStr(dw2);
Edit17.Text:=FloatToStr(db1);
Edit18.Text:=FloatToStr(db2);
Edit19.Text:=FloatToStr(da1);
Edit20.Text:=FloatToStr(da2);
Edit21.Text:=FloatToStr(df1);
Edit22.Text:=FloatToStr(df2);
Edit23.Text:=FloatToStr(S1);
Edit24.Text:=FloatToStr(S2);
Edit25.Text:=FloatToStr(P);
Edit26.Text:=FloatToStr(Pb);
Edit27.Text:=FloatToStr(r);
end;
end.
Вид приложения
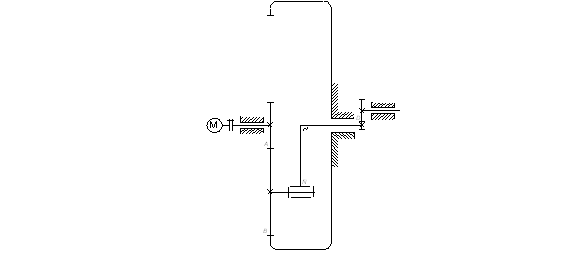
3.2 Проектирование планетарного редуктора
Исходные данные:
Модуль ![]()
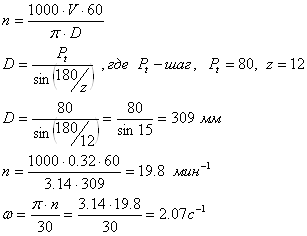
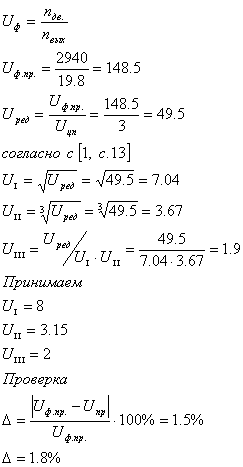
Частота вращения вала двигателя ![]()
Частота вращения кривошипа ![]()
Числа зубьев ![]()
Знак передаточного отношения – минус
Номер схемы редуктора ![]()
1. Передаточное отношение простой передачи
![]()
2. Общее передаточное отношение редуктора
![]()
3. Передаточное отношение планетарной передачи
![]()
4. Формула Виллиса для планетарной передачи
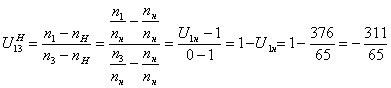
5. Передаточное отношение обращенного механизма, выраженное в числах зубьев.
![]()
6. Подбор чисел зубьев
Принимаем:
![]() тогда
тогда ![]()
![]()
Получаем ![]()
7. Условие соосности
![]() или
или ![]()
Условие соосности выполнено
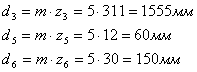
8. Делительные диаметры
![]()
![]()
9. Линейная скорость точки A колеса z1
![]()
10. Масштабный коэффициент Kv
![]()
11. Масштабный коэффициент построения плана частот вращения редуктора
![]()
3.3 Определение частот вращения аналитическим методом
![]() ; откуда
; откуда ![]() .
.
![]() ;
; ![]() ;
; ![]() ;
; ![]()
Похожие работы
... *0,72*0,992=3,764 кВт; Р4=Р3 η3=5,124*0,95=3,576 кВт, что близко к заданному. Определяем вращающие моменты на каждом валу привода по формуле (Нм) (2.5) ; ; ; . Все рассчитанные параметры сводим в табл.1. Таблица 1 Параметры кинематического расчета № вала n, об/мин ω, рад/с Р, кВт Т, Нм U Дв. (1) 1444,5 151,27 5,5 36,35 2 ...
... = 60 ґ n ґ Lh / 106 L = 60 ґ 1435 ґ 100000 / 106 = 861 7.1.9. Определяю расчетную динамику подшипника c = PIIпр3.3 z c = 1222.16 3.3 861 = 9473.77 Основные характеристики принятого подшипника: Подшипник № 36205 d = 25мм D = 52мм C = 16700H = 15мм r = 1.5мм C0 = 9100H n = 13000 об/мин 7.2. Проектный расчет второго вала редуктора и подбор подшипников d2 = c 3 ...
... ; ´Рэ Рэ = 2.2 кВт Т.к. частота вращения nс = 1500 об/мин; число полюсов 4 и S% = 5,1, то По табл. П2 с.65 [1] выбираем условное обозначение электродвигателя 4А132S5 1.2 Кинематический расчет привода Определяем асинхронную частоту вращения. nq = nc (1 – (S% / 100)) nq = 1500(1-(5.1 / 100)) = 1423 Определяем общее передаточное число привода. U = nq /nб U = 1423/160 = 8.9 ...
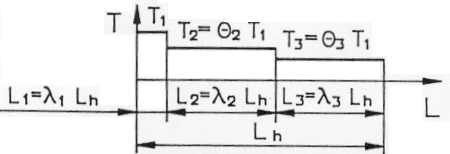
... выбранного двигателя необходимо проверить по следующим условиям: · Условия неперегревания · Условие перегрузка Так условию перегрузки удовлетворяет лишь двигатель 4А160М2У3, то принимаем его в качестве привода редуктора. 1.2 Определение исходных данных Определение длительности действия max нагрузок Так как N1>5*104 => первая передача рассчитывается на усталость с 1 – го ...
0 комментариев