Навигация
4.1 Расчет кулачка
Линейный закон перемещения выходного звена может обеспечить кулачок с профилем в виде спирали Архимеда [5]. Радиус-вектор профиля записывается выражением:
![]() (4.1.1)
(4.1.1)
где R – текущий радиус кулачка.
![]() - минимальный радиус кулачка.
- минимальный радиус кулачка.
![]() - текущий угол.
- текущий угол.
с – аналог скорости движения толкателя.
В кулачковых механизмах с выходным звеном типа толкатель угол давления , то есть угол между нормалью к профилю кулачка в точке контакта с толкателем и направлением скорости толкателя, должен быть менее 30. Для обеспечения плавности хода толкателя примем
Для исключения резких ударов толкателя о кулачок при завершении программы (одного оборота кулачка) примем рабочий угол кулачка 270Оставшаяся часть будет служить для плавного возврата толкателя в исходное положение. Отсюда определим аналог скорости толкателя:
 (4.1.2)
(4.1.2)
с=7/(270*3.1415/180)=1.4875 мм/рад.
Согласно формуле [4]:
![]() (4.1.3)
(4.1.3)
определим минимально допустимый минимальный радиус кулачка:
![]() =16.98 мм.
=16.98 мм.
Принимаем
![]() мм.
мм.
Максимальный радиус:
![]() =20+7=27 мм(4.1.4)
=20+7=27 мм(4.1.4)
По программе, приведенной в приложении со следующими исходными данными:
- Максимальный ход толкателя ![]() =7 мм.
=7 мм.
- Минимальный радиус ![]() =20 мм.
=20 мм.
- Угол давления =5.
- Рабочий угол кулачка =270
- Расчетный шаг 10.
Результат расчета приведен в таблице:
Таб.1.
| Угол | 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 |
| Радиус | 20.0 | 20.3 | 20.5 | 20.8 | 21.0 | 21.3 | 21.6 | 21.8 | 22.1 | 22.3 | 22.6 | 22.8 |
| Угол | 120 | 130 | 140 | 150 | 160 | 170 | 180 | 190 | 200 | 210 | 220 | 230 |
| Радиус | 23.1 | 23.4 | 23.6 | 23.9 | 24.2 | 24.4 | 24.7 | 24.9 | 25.2 | 25.4 | 25.7 | 26.0 |
| Угол | 240 | 250 | 260 | 270 | 280 | 290 | 300 | 310 | 320 | 330 | 340 | 350 |
| Радиус | 26.2 | 26.5 | 26.7 | 27.0 | 26.1 | 25.2 | 24.4 | 23.5 | 22.6 | 21.8 | 20.9 | 20.0 |
Материал для кулачка выбираем [5] Сталь 50 с закалкой рабочей поверхности токами высокой частоты.
Похожие работы
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... территорий, а также являются базисом для создания эффективных инструментов политики, особенно для регионального развития. Функционирование программных механизмов в российских условиях. Проблемы социально-экономического развития регионов носят масштабный характер. В перспективе возможно, что Россия, как и другие страны, будет одновременно внедрять макро-, микро- и координационную политику для ...
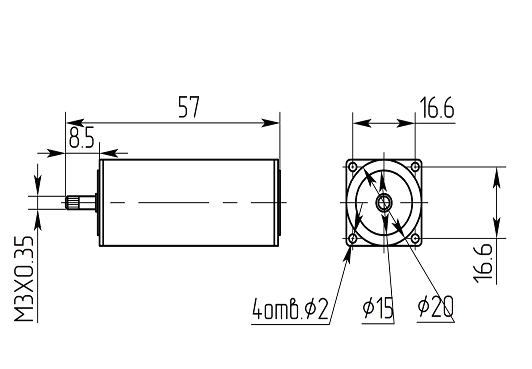
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев