Навигация
Расчет цилиндрической пружины толкателя
29023
знака
1
таблица
4
изображения
4.2 Расчет цилиндрической пружины толкателя
Цилиндрическая винтовая пружина, работающая на сжатие, служит для обеспечения механического контакта между кулачком и толкателем. Расчет пружины будем производить по изложенной в [5] методике. Исходные данные для расчета:
- Наибольшее давление на толкатель ![]() =5.5 Н.
=5.5 Н.
- Наименьшее давление на толкатель ![]() =0.2
=0.2![]() =5.5*0.2=1.1 Н.
=5.5*0.2=1.1 Н.
- Рабочий ход пружины =7 мм.
- Ориентировочный наружний диаметр D=7-9 мм.
- Число рабочих циклов не менее 2000*3600сек*6500/22=0.27*![]() , что соответствует пружине I класса.
, что соответствует пружине I класса.
- Заделка с двух сторон глухая.
- Материал для пружины Сталь У9А.
- Относительный инерционный зазор =0.05-0.25
Сила пружины при максимальной деформации:
- ориентировочное значение:
![]() =5.5/(1-(0.05-0.25))=7.33-5.79 Н.(4.2.1)
=5.5/(1-(0.05-0.25))=7.33-5.79 Н.(4.2.1)
Наиболее полно нашим требованиям подходит пружина номер 144 ГОСТ 13766-86 [5] со следующими параметрами:
- Сила максимальной деформации пружины ![]() =8.5 Н.
=8.5 Н.
- Диаметр проволоки d=0.6 мм.
- Наружний диаметр пружины D=7.5 мм.
- Наибольший прогиб одного витка ![]() =2.152 мм.
=2.152 мм.
Предел прочности при растяжении проволоки I класса (таб. 3.28 [5]) пч=2650-3000=2700 МПа.
Максимальное касательное напряжение max=0.3*2700=810 МПа. (Сталь У9А).
Жесткость пружины
![]() =(5.5-1.1)/0.007=640 Н/м(4.2.3)
=(5.5-1.1)/0.007=640 Н/м(4.2.3)
Жесткость одного витка
![]() =8.5/0.002151=3.95*103 Н/м(4.2.4)
=8.5/0.002151=3.95*103 Н/м(4.2.4)
Число витков:
- рабочих
![]() =3.95*103 /640=6.2(4.2.5)
=3.95*103 /640=6.2(4.2.5)
- опорных
- ![]() .
.
- полное
![]() =6.2+2=8.2(4.2.6)
=6.2+2=8.2(4.2.6)
Деформация:
- предварительная
![]() =1.1/640=1.7*10-3 м(4.2.7)
=1.1/640=1.7*10-3 м(4.2.7)
- рабочая
![]() =5.5/640=8.7*10-3 м(4.2.8)
=5.5/640=8.7*10-3 м(4.2.8)
- максимальная
![]() =8.5/640=13.28*10-3 м(4.2.9)
=8.5/640=13.28*10-3 м(4.2.9)
Число зашлифованных витков
![]() =1.5.
=1.5.
Высота пружины:
- при максимальной деформации
![]() =(8.2+1-1.5)0.6=4.62 мм(4.2.10)
=(8.2+1-1.5)0.6=4.62 мм(4.2.10)
- в свободном состоянии
![]() =4.62+13.28=17.9 мм(4.2.11)
=4.62+13.28=17.9 мм(4.2.11)
- при предварительной деформации
![]() =17.9-1.7=16.2 мм(4.2.12)
=17.9-1.7=16.2 мм(4.2.12)
- при рабочей деформации
![]() =17.9-8.7=9.2 мм(4.2.13)
=17.9-8.7=9.2 мм(4.2.13)
Средний диаметр пружины
![]() =7.5-0.6=6.9 мм(4.2.14)
=7.5-0.6=6.9 мм(4.2.14)
Отношение высоты в свободном состоянии к среднему диаметру и предельное значение этого параметра
![]() =17.9/6.9=2.5(4.2.15)
=17.9/6.9=2.5(4.2.15)
 =5.24>2.5 – условие устойчивости выполняется.
=5.24>2.5 – условие устойчивости выполняется.
Индекс пружины
![]() =6.9/0.6=11.6(4.2.16)
=6.9/0.6=11.6(4.2.16)
Коэффициент кривизны витка
k=![]() =(4*11.6-1)/(4*11.6-4)+0.615/11.6=1.124(4.2.17)
=(4*11.6-1)/(4*11.6-4)+0.615/11.6=1.124(4.2.17)
Расчетное касательное напряжение
![]() =(8*1.124*8.5*6.9*10-3)/(3.14*0.63)=777.8*106 Па (4.2.18)
=(8*1.124*8.5*6.9*10-3)/(3.14*0.63)=777.8*106 Па (4.2.18)
Проверка прочности: 777.8Мпа<810 МПа.
Шаг пружины
![]() =2.152+0.6=2.752 мм(4.2.19)
=2.152+0.6=2.752 мм(4.2.19)
Длина развернутой проволоки
![]() =3.14*6.9*8.2=177.7 мм(4.2.20)
=3.14*6.9*8.2=177.7 мм(4.2.20)
Плотность стали
![]() =7.8 г/см3.
=7.8 г/см3.
Масса пружины
![]() =0.785*0.063*177.7*7.8=3.9 г (4.2.21)
=0.785*0.063*177.7*7.8=3.9 г (4.2.21)
Объем, занимаемый пружиной
![]() =0.785*0.75*0.1622=0.93 см3=930 мм3(4.2.22)
=0.785*0.75*0.1622=0.93 см3=930 мм3(4.2.22)
Похожие работы
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... территорий, а также являются базисом для создания эффективных инструментов политики, особенно для регионального развития. Функционирование программных механизмов в российских условиях. Проблемы социально-экономического развития регионов носят масштабный характер. В перспективе возможно, что Россия, как и другие страны, будет одновременно внедрять макро-, микро- и координационную политику для ...
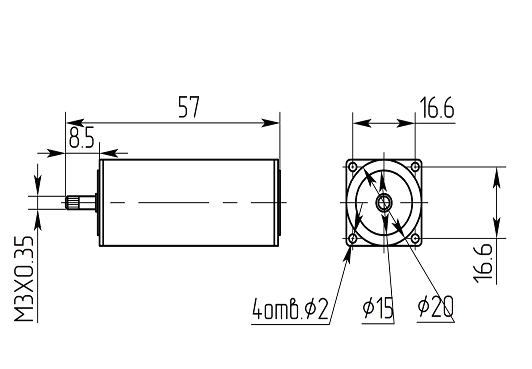
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев