Навигация
Расчет толкателя. Определение реакций опор толкателя
29023
знака
1
таблица
4
изображения
4.3 Расчет толкателя. Определение реакций опор толкателя
Конструктивно, выберем толкатель в форме стержня с круглым сечением и сферическим наконечником. Такой выбор продиктован тем, что сферические наконечники, имеющие достаточно большой радиус закругления, обладают повышенной контактной прочностью. Толкатель должен иметь также ступицу в качестве упора для пружины, прижимающей сам толкатель к кулачку. Диаметр толкателя выберем из условия прочности на изгиб.
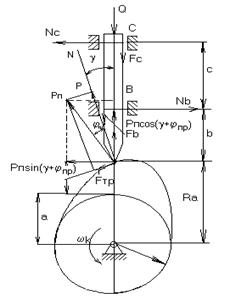
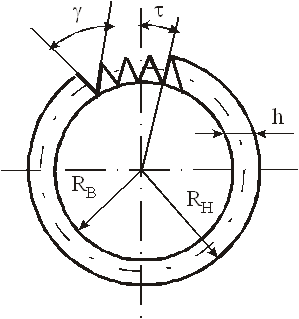
Рис. 2. Силовая схема кулачкового механизма.
Сила Q, прижимающая толкатель к кулачку, является равнодействующей нескольких сил: Qпс –полезного сопротивления.
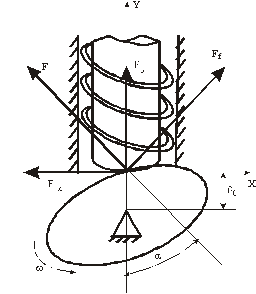
Qпр – давления пружины.
Qт – тяжести.
Pи – инерции:
Q= Qпс+ Qпр+ Qт Pи(4.3.1)
Кулачок давит на толкатель с силой Р, которая направлена перпендикулярно профилю кулачка и составляет с направлением вектора скорости толкателя угол давления В нашем случае он составляет (см. п.4.1) 5.
Сила Р определяется как [5]:
Р=Qпс/(cos)(4.3.2)
Где
f[1+(2b/c)]tg(4.3.3)
– КПД кулпчково-ползунного механизма.
B=30 мм.,c=45 мм.
F=0.15
=1-0.15[1+(2*30/45)]tg596.
Таким образом:
Р=5.5/(0.96*cos5)=5.75 H.
Определим приведенный коэффициент трения [1]:
пр=arctg(fтр)(4.3.4)
fтр- коэффициент трения сталь по стали – 0.15.
пр=arctg(0.15)=9.47.
Равнодействующая сил трения Р и Fтр называется полной силой давления кулачка на толкатель.
![]() (4.3.5)
(4.3.5)
Pп=5.75/cos 9.47=5.83 H.
Раскладывая силу Рп на две составляющих, получаем:
- ![]() - сила, изгибающая толкатель и вызывающая реакции Nb и Nc в его направляющих, от величины которых зависят значения сил трения Fb и Fc.
- сила, изгибающая толкатель и вызывающая реакции Nb и Nc в его направляющих, от величины которых зависят значения сил трения Fb и Fc.
![]() =5.83*sin(5+9.47)=1.46 H.
=5.83*sin(5+9.47)=1.46 H.
- ![]() - сила, движущая толкатель, которая преодолевает силы Q, Fb ,Fc.
- сила, движущая толкатель, которая преодолевает силы Q, Fb ,Fc.
![]() =5.83*cos(5+9.47)=5.65 H.
=5.83*cos(5+9.47)=5.65 H.
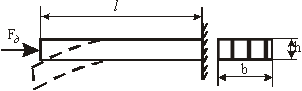
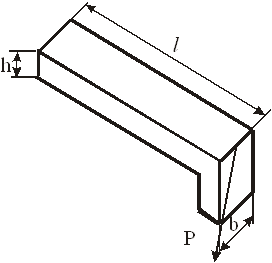
Таким образом, величину изгибающего момента можно определить как:
Ми=![]() b=1.46*30=43.8 Н*мм. (4.3.6)
b=1.46*30=43.8 Н*мм. (4.3.6)
Диаметр толкателя из условия прочности на изгиб определим по формуле:
 (4.3.7)
(4.3.7)
Для стали 45 (материал толкателя) [1] в=120 МПа. []и=0.16 в =0.16*120=19.2 МПа.
Таким образом, находим наименьший диаметр толкателя:
![]() =2.8 мм.
=2.8 мм.
С учетом коэффициента запаса 1.5 принимаем диаметр толкателя d=4мм.
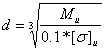
Составим систему трех условий, согласно которой система должна находиться в равновесии (на основании принципа Даламбера):
 (4.3.8)
(4.3.8)
Решая первые два уравнения, можно определить опорные реакции в направляющех толкателя Nb и Nc.
![]() =1.46(30+45)/45=2.43 Н.
=1.46(30+45)/45=2.43 Н.
![]() =2.43-1.46=0.97 Н.
=2.43-1.46=0.97 Н.
Fb и Fc – силы трения в опорах:
Fb=Nb*f‘ , Fc=Nc*f’(4.3.9)
Где f’=tg’ – коэффициент трения между направляющей и толкателем.
5. Контактный расчет
В узлах механизма силы между деталями передаются при начальном касании рабочих поверхностей в точке или по линии. По мере возрастания силы за счет упругих деформаций материала появляются площадки контакта, разметы которых весьма малы по сравнению с размерами поверхностей соприкасающихся деталей.
Силы действуют нормально к поверхности деталей и создают в местах контакта нормальные контактные напряжения. Контактную (или поверхностную) прочностьдеталей при статическом нагружении оценивают по максимальным контактным напряжениям max, возникающим в центре площадки контакта. Напряжения на площадках контакта при удалении от точки или линии первоначального соприкосновения уменьшаются по нелинейному закону. Нелинейный характер имеет и зависимость между размерами площадки контакта и значением нормальной силы.
Поверхностную прочность деталей при статическом нагружении проверяют по условию:
Похожие работы
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... территорий, а также являются базисом для создания эффективных инструментов политики, особенно для регионального развития. Функционирование программных механизмов в российских условиях. Проблемы социально-экономического развития регионов носят масштабный характер. В перспективе возможно, что Россия, как и другие страны, будет одновременно внедрять макро-, микро- и координационную политику для ...
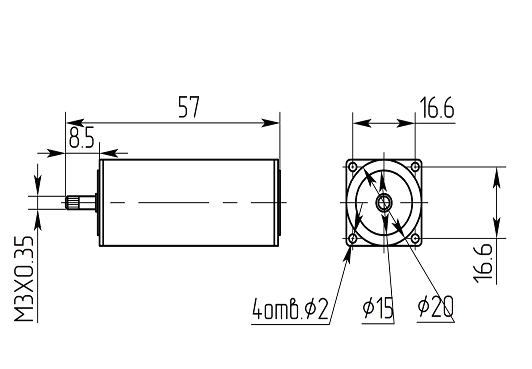
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев